1 系统组成
1.1 统的硬件构成
本系统包括发送端和接收端2部分,两部分均采用Samsung公司生产的S3C2410处理器做硬件开发平台。S3C2410在片上集成了丰富的组件:分开的16 KB指令Cache和16 KB数据Cache、用于虚拟存储器管理的MMU、支持STN和TFT的LCD控制器、NAND Flash启动装载器、具有片选逻辑和SDRAM控制器的系统管理器、3通道UART、4通道DMA、4通道PWM定时器、I/O口、RTC、8通道10 位ADC和触摸屏接口、I2C总线接口、I2S总线接口、USB主设备、USB从设备、SD卡和MMC卡接口、2通道的SPI以及PLL时钟发生器,还采用了AMBA(advanced micrcocontroller bus architecture)新型总线结构。
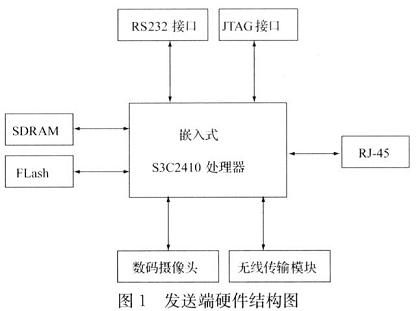
应用S3C2410处理器平台搭建的发送端硬件结构如图1所示:包括S3C2410处理器、 RS232接口、JTAG接口、RJ-45接口、SDRMA、Flash、电源、通过USB口连接的视频采集模块和通过USB接口连接的视频发射模块。 RS232串口用于人机交互及低速数据的收发,应用电平转换芯片MAX-323进行串口电平和TTL/CMOS电平的转换。JTAG接口用于下载 Bootloader。RJ-45接口用于和以太网连接,下载操作系统Linux内核、根文件系统和应用软件。SDRMA用于系统的数据存储器、 Flash用于系统的程序存储器。
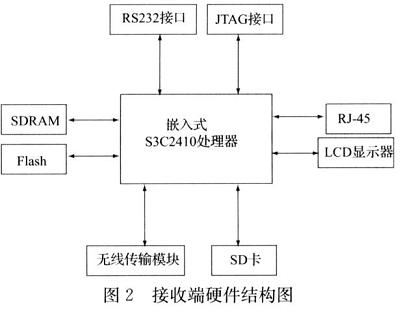
应用S3C2410处理器平台搭建的接收端硬件电路如图2所示:与发送终端相比,多了SD卡和LCD显示器。SD卡主要用来存储数据,LCD显示器主要用来显示视频图像。
1.2 系统软件设计
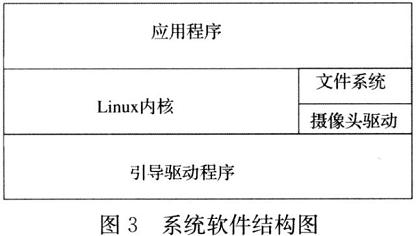
系统的软件构成分为引导驱动程序、操作系统、文件系统和应用程序4部分,如图3所示。引导驱动程序在系统启动时进行内存重映射,将保存在 Flash中的操作系统和应用程序重新映射到SDRAM中。Linux的内核版本为LinIix2.6。文件系统是Yaffs,它包括模块、配置文件和库等。系统的应用程序建立在嵌入式Linux内核、摄像头驱动和文件系统之上。
2 视频采集的具体实现
USB摄像头连接简单、使用灵活、价格低廉且具有良好的性能,因此,得到了广泛的应用。Linux内核包含了多种USB摄像头驱动,最常用的有基于OV5ll及其兼容芯片。OV511芯片主要包括CAMERA接口、DRMA接口、ISO FIFO接口和OmniCE以及USB控制器等部分。本设计使用的是在低端市场占有率较高的中芯微公司生产的ZC030x系列摄像头芯片。Linux系统中的视频子系统’Vide04linux为视频应用程序提供了一套统一的API,视频应用程序通过调用API即可操作各种不同的视频捕获设备,包括电视卡、视频捕捉卡和USB摄像头等。本设计的具体实现过程如下所述:
2.1 摄像头驱动的实现
1)配置Vide04linux内核
在终端使用make menuconfig命令打开S3C24lOlinux内核编译的main menu窗口,并进入“multimedia device———>”菜单选项,然后将Video for Linux配置为模块,即:
Device driver———>
Multimedia devices———>
<*>Video for linux
2)配置OV511驱动
返回主菜单,在进入“USB support———>”菜单选项,然后将USB OV5llcamera support设置为模块,即:
SUB suppor———>
<*>USB OV5llcamera support(NEW)
3)模块安装
执行以下命令安装视频输入模块:
insmod videodev.o
执行以下命令安装视频输入设备驱动模块:
insmod usbcore.o
insmod usb-ohci-s3c2410.ko
insmod ov511.o
由于使用的设备是USB接口的摄像头,所以在加载ov511.o模块前,需要加载USB内核驱动和主机控制器驱动。
2.2 利用Vide041inux实现图像采集
在安装了图像采集设备驱动后,只需要再编写一个对视频采集的应用程序就可以采集视频图像。在Linux系统中,视频文件是设备文件,可以像访问普通文件一样对其进行读写,摄像头文件一般是/dev/v4l/video。在进行视频捕捉之前,需要做一些必要的设置工作。这些设置涉及到如下结构:
V4L下视频采集编程首先要打开视频设备:
Int fd="open"(“/dev/v4l/video”,O_RDONLY);
If(fd
接着对摄像头参数进行设置。一般是先通过I/O控制命令读取设备信息,然后对特定项进行修改,最后通过I/O控制命令保存到内核中。由于篇幅有限源程序不再赘述。
获取基本信息后,可以输出显示,也可以通过ioctl系统调用对这些值进行修改。然后调用函数 Char*Carmera_get_image(video_device*vd)获得图像数据指针。此函数比较重要,关系到图像采集的效率。获取图像数据有2种方法:一是通过映射得到视频驱动的数据缓冲,然后直接对映射后的缓冲进行读操作;二是直接读设备,及调用read函数。下面分别介绍:
(1)read系统调用方式比较简单,只需将前面得到摄像头参数传入read函数中,得到图像数据指针picture_p后返回即可:read(vd->fd,picture_p,width*hight);其中vd_>fd为设备文件描述符。
(2)利用mmap方式先使用ioctl(fd,VIDIOCGMBUF,&grab_vm)函数获得摄像头存储缓冲区的帧信息,之后修改voideo_mmap中的设置,例如重新设置图像帧的垂直及水平分辨率、彩色显示格式,使用如下语句:
grab_buf.height=240;
grab_buf.width=320;
grab—buf.format=VIDEO_PALETTE_RGB24;
接着把摄像头对应的设备文件映射到内存区,具体使用grab_data=(unsigned char*)mmap(O,grab_vm.size,PROT_READ|PROT_WRITE,MAP_SHARED,grab_fd,O)操作。这样设备文件的内容就映射到内存区,该映射内容区可读可写并且不同进程间可共享。该函数成功时返回图像数据的指针,失败时返回值为-1。
3 无线传输模块
本系统选用西门子的MC235作为GPRS通信模块,来实现图像的无线传输。该模块结合语音、数据传输、短信服务等功能,最大传输速率可以达到85.6 Kbps,具有丰富的AT指令使模块与微处理器通信,功能强大,操作灵活方便,特别适用于数据的监测和传输。
在进行GPRS传输操作之前需对模块进行设置,主要有:(1)设置通信波特率;(2)设置接入网关;(3)设置移动终端类别;(4)测试 GPRS服务是否开通,激活GPRS功能。这些设置都在主程序的初始化代码段完成。通过测试,GPRS驱动正常工作,能很好地支持数据/命令复合协议传输,其协议的丢包率、吞吐量等性能指标与无线模块的指标无实质性差别,整个系统工作正常,基本达到设计要求。
4 结束语
本文基于S3C2410的硬件平台和嵌入式Linux的软件平台,实现了视频信号的采集和网络传输。发送端由于把图像压缩和网络功能集成到一个体积很小的设备内,并直接通过无线方式接入GPRS网,省掉各种复杂的电缆连接,安装方便;用软件的方法替代了以往许多用硬件模块实现的功能,同时实现了收发双方体积的小型化和低功耗,在网络状况较为理想的情况下,系统在图像分辨率为352×288,像素为16位的情况下,可以实现每秒钟传送1帧图像。整个系统具有稳定可靠、安装简便、成本低廉等特点,可扩展应用在工业控制、视频会议系统、可视电话、远程监控系统等诸多领域。



























