本文作者:
飞思卡尔公司 David Lopez & Philippe Mounier
摘要
行业正在面临着看似截然相反的两种发展趋势,一种趋势需要更高带宽,以更低的成本提高数据交换速率;另一种趋势则需要出色的能源效率。CAN是平衡这两种需求的核心所在,这需要推出多种创新技术,既要分别利用这些技术,同时又将它们相互结合,以便应对这两种趋势,最终各种需求和限制因素归结为物理层的实现。
本文介绍CAN FD(Flexible data)可变速率物理层的技术挑战、潜在的应用案例场景,包括边界条件下的可靠性要求,以及与替代性解决方案相比,为网络带来的器件节省优势。与此同时,为了功耗优化,可供选择的是否带唤醒系统功能的CAN收发器在汽车行业的应用在不断增加,并且能够为有这类需求的其它市场(例如工业市场)带来极大的效益。
每一种创新都有助于确保并且增强CAN的使用性能,提高效率或增加传输速率,如今这些创新相互组合,又需要解决各种全新的挑战。
在汽车网络领域,通信标准已经向前迈出了重大一步,电子设备延伸到各种汽车平台。自从1980年控制器局域网(CAN)创建以来,它便在一直适应发展,解决了这个行业的带宽、可靠性和低功耗等方面的各种挑战。
各种市场都采用了CAN拓扑技术。CAN最初的开发目的是为了支持汽车市场,随着获得汽车5大领域(动力总成、底盘、安全、车身和车载信息娱乐系统)的大范围认可,CAN如今已经应用于众多其它领域(重型车辆——基于J1939的解决方案、农业机械——ISO 11783,又称Isobus、航天系统——Arinc 825/6、移动设备、医疗和不断发展壮大、采用CANopen EN50325-4和CANopen安全标准EN 50325-5的工厂自动化应用)。
到2015年将会达到20亿个节点(80%的节点属于汽车市场,其它属于工业市场),CAN会成为最大规模工业网络标准的组成部分,并在对成本和可靠性敏感的应用中受到越来越多的关注。
CAN市场细分,单位百万(2015年)

CAN的优势有多种:由基于全差分结构,可以用于系统间通信 ,降低了噪声干扰;它还可以作为即插即用解决方案,提供灵活的带宽。此外,由于通过行业规范的认可和兼容性一致性测试(电气和EMC/ESD),大幅提高了物理层对外部干扰的抵抗能力和内部噪声的抑制能力。CAN收发器的这些新的技术革命带来了他的使用更加简单、快速和强健。
这种标准化的进程有利于CAN总线技术在市场上的快速增长,降低了这种技术解决方案的整体成本。
如今,为了适应更快通信换速率的行业发展趋势,以及降低网络能耗的需求,由此推出了新的标准。
CAN PN(partial networking) (ISO11898-6)支持选择性唤醒,在物理层内部可以存储并检查ECU唤醒。其次,另一个问题便是需要提高带宽,CAN FD确保了在传输期间实现更快的波特率和更高的数据量。
提高网络级的带宽可以延迟向更高波特率网络的过渡,并且成本更低(与FlexRay或者以太网相比),提供中间系统解决方案,满足更高通信速率的需求。
这样的演变需要物理层做出相应的调整以适应每一种市场的需求,而且需要将各种架构加以整合,以便维持强劲的性能。
CAN高速物理层和提高带宽的挑战
如今大部分汽车CAN使用速率为500 kb/s。只有少数应用的运行速率达到1 Mb/s,但它们会面临严重的技术限制条件,例如网络长度和节点数量,CAN FD允许提高CAN帧数据段的比特率,并且可以扩大传输数据字节的数量,同时数据帧起始段(ID,DLC)与现行的波特率保持一致大多数情况下为500 kb/s。这从整体上有助于提高CAN协议的效率,同时确保运行现有的CAN网络拓扑技术(长度、存节点、终端概念)。
在最初发布时,CAN FD协议和技术规范声称其可以使用现有的CAN收发器,尽管运行速率可高达8 Mb/s。但是,深入分析ECU和主要的CAN收发器设备在最终应用环境(例如EMC)中应该满足的要求、环境和技术规范,所得结论是:至少需要对CAN收发器实施一定的优化,最终大幅改变收发器的理念或设计,从而全面符合可变速率的技术规范。
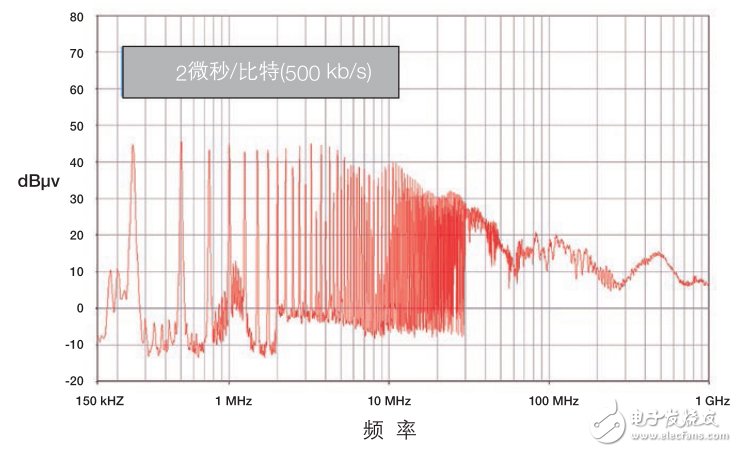
关于EMC,辐射干扰或传导干扰取决于信号完整性和CAN信号的波形。然而,CAN传输波特率(即500 kb/s)衍生出的基波和谐波在整个频谱范围内都是清晰可见的。
为了提高CAN FD波特率,部分比特数据通过更高波特率传输,这会导致谐波“移动”到更高频率的频谱范围。
在这些频率下,要求具有极低的干扰,如果没有外部滤波组件或内在的设计改进,CAN FD收发器将难以满足这些需求。以下波形展示介绍了500 kb/s和2 Mb/s速率时典型的CAN接口频谱图,未采用外部滤波器。数值根据IEC61967 [8]标准测量获得。在CAN FD2 Mb/s的速率下运行时产生的频率“位移”清晰可见。
MC33901在速率为500 kps和2 Mbps时的CAN干扰对比

为了保持汽车市场的EMC等级要求,需要对 CAN驱动程序进行优化,CAN FD 的传输速率达到2MB/s是第一步,以后还会实现更高的传输速率。
本文选自电子发烧友网7月《汽车电子特刊》Change The World栏目,转载请注明出处!

CAN可靠性
CAN物理层收发器的一个重大性能革命在于它实现了自身抵御系统噪声的干扰,无论有无外部的保护器件。在定义CAN物理层时需要考虑多种规范的需求。
为了解决这些挑战,在 (EME、EMI、ESD) 领域,利用先进的混合信号和电源技术SMARTMOS 8工艺,已经开发出一系列丰富多样的创新,以便实现系统可靠性的提升,并且无需外部扼流圈保护便可达到标准。
抗干扰设计:
CAN网络如同吸收电磁噪声的天线,它通过类似电动机、电磁阀、继电器这样负载切换或者通过外部来源生成。在CAN通信期间,当施加电磁噪声时,信号完整性不能被干扰。
这被称为电磁抗干扰(EMI)。主要采用两种EMI测试模拟以验证物理层的可靠性:分别是直接功率注入法(IEC62132-4)和大电流注入法(ISO11452-4) [2]。
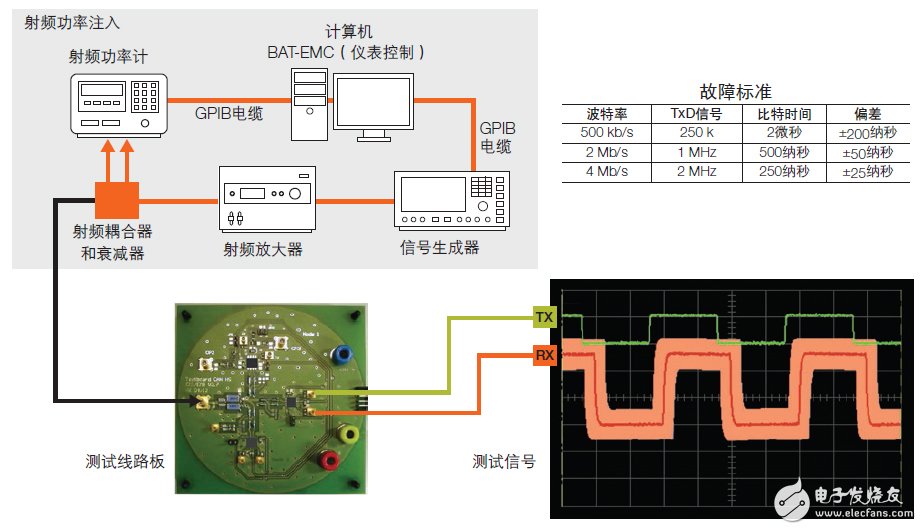
在外部EMC的入侵下,MCU TxD和RxD终端之间数据的传输和接收的信号应该在一定范围内震荡。随着传输速率的提高,数据的保持时间会减少,所能接受的信号震荡容限范围会随之降低这需要CAN收发器具备出色的EMC性能。
下图为EMC测试原理的简化图,通过耦合电容器施加射频干扰,同时收发器向总线传输数据。监控收发器RxD信号,并与信号模板对比,它包含了允许的电压和时序偏差(抖动)的典型信号。这种波动会变得越来越小,以适应CAN FD的运行。
EMC测试设置和容差范围简化示意图
在物理层中,可以提供完整的EMC设计流程,包括准确的设计和布局指南、丰富的模块级和顶层单元级仿真以及EMC仿真内部运行中包括了工艺和温度变量在内的各种模型,从而针对技术规范确保一定程度内的余量。由此,这些设计的改进确保了CAN信号完整性,支持信号注入量达到39 dBm。
通过CAN FD使用案例,不受EMC的限制,部分传播延迟还可以经过优化,从而实现更高波特率的运行。这种物理层设计的演变对抗干扰性产生了影响,允许的抖动窗口变得越来越小。噪声敏感度也因此增强,设计需要更高的抗干扰解决方案。下图展示了在2 Mb/s的使用案例情况下,飞思卡尔MC33901 CAN高速物理层通过了DPI注入的性能。
MC33901/MC34901 – 带有扼流圈时的直接功率注入CAN,2 Mb/s

凭借高ESD性能提高系统可靠性:
物理层有专门的设计用于承受IC级和系统级定义的最严格ESD标准。它通过了AEC Q-100文档中的规定ESD测试:人体模型(HBM) +-10 kV、机器模型(MM) +-200 V和带电设备模型(CDM) +-750 V。此外,物理层经过优化,还通过了ISO10605:2008 [3]、IEC61000-4-2:2008 [4]、HMM(人人体金属模型)[5]定义的系统级压力测试。
ESD GUN可以用于重现人体处理电子系统子部件或者接触汽车/设备结构时静电放电的影响。测试物理层所用的标准为ISO10605:2008、EN 61000-4-2:2008技术规范,IC上电和未上电。在集成电路开发阶段必须考虑到所有这些标准,因为每一种标准的设置变量都会导致不同的抗压特性。
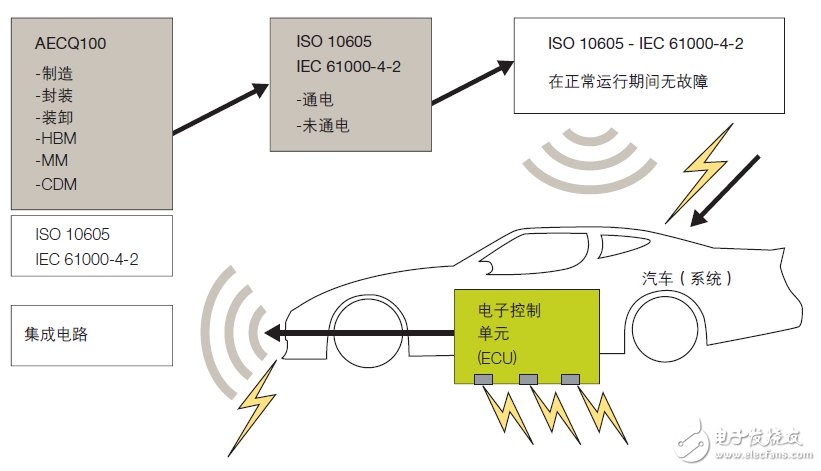
系统级到组件级的ESD技术规范
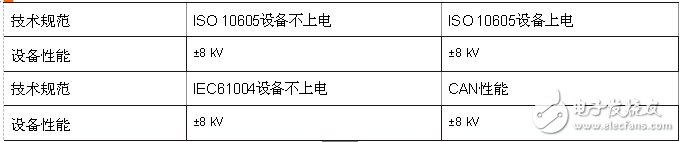
CAN H和CAN L引脚具有强大的抗静电电压等级,可以预防直接施加在引脚级的系统级压力,无论带或不带外部保护。为了获得这样的高性能(25 kV),采用了SEED [7]方法(系统高效ESD设计推广一种板载和片上芯片ESD保护的IC/OEM协同设计方法,从而获得系统级ESD)。下表归纳了一个飞思卡尔CAN高速物理层的ESD性能实例。
ESD性能汇总
高ESD和DPI的性能组合是对能量吸收的挑战,同时不可降低CAN通信速度。如上表所示,最新的CAN物理层旨在通过所有组件和系统ESD压力测试,同时对外部EMI干扰免疫,无论是否添加外部组件(例如扼流圈),并且处于最优的裸片区域内。所有这些创新构成物理层进一步集成(系统基础芯片(SBC)、ASSP、ASIC)的可靠性的基础。这些限制条件相互组合,是IC架构的基础所在,从而成功通过最终验收。
本文选自电子发烧友网7月《汽车电子特刊》Change The World栏目,转载请注明出处!
CAN和能源效率
由于CAN标准的演变和创新,可以实现系统级的电流和功耗管理。在汽车中未使用时通过禁用和激活低功耗模式,可以降低和优化整个系统的电流消耗。当然在必要情况下,ECU应当恢复运行。
如图所示,可以分析2个ECU、汽车泊车辅助和电子泊车制动的运行。当汽车的运行速度超过一定数值时(比如数千公里/小时),这些ECU就不再需要工作了。此时,这些ECU可以自行设置为低功耗模式,它们通过CAN网络和CAN报文接收车辆速度。当速度大于预先设定的阈值,这些ECU可以主动设置为低运行模式,禁用或关闭线路板组件(例如MCU或负载驱动器)的电源。只需最少的IC保持激活状态,用于监控CAN总线流量并检测特定的CAN报文或CAN的部分报文,它可以指示何时给暂停运行的IC重新上电,以便指示这些ECU它们应该恢复运行。
这有助于汽车整体功耗的降低和优化。
可以通过在与CAN总线相连的CAN收发器内部执行CAN报文检测,实现这种操作。这被称为CAN局部网络或CAN选择性唤醒。
挑战在于,通过极低功耗(目标低于500 uA)能够解码输入的CAN帧,在CAN物理层内以最低成本获得完整的局部网络,且不使用精确的振荡器组件(例如晶体振荡器或共振器)。需要提醒的是,MCU内部的CAN控制器采用极为准确的时钟,其测量的精度和偏差均可达到ppm级。显然,这样的时钟精度在硅片中还不能实现。
然而,CAN报文和解码只需要“百分比”量程的时钟。因此,凭借创新的技术和解决方案,这些方案可在混合信号硅工艺中完成,CAN报文的集成可以实现,从而用于CAN收发器功能。
这些解决方案采用高精度模拟功能(例如低功耗精确振荡器、低电流差分接收器、低功耗基准电压和偏置电路),并且与数字CAN报文解码器相互结合,以便实现输入CAN报文的解码。然后,输入CAN报文与预先选择的报文进行比较,收发器唤醒,并且驱动ECU恢复运行。
此外还面临着多种EMC挑战,尽管汽车中存在射频干扰和电气瞬变,CAN帧仍然需要正确解码。只有电路在极低电流下运行(大约十分之一微安),才能实现整体500微安的功耗目标,这变成了一项真正的实施挑战。
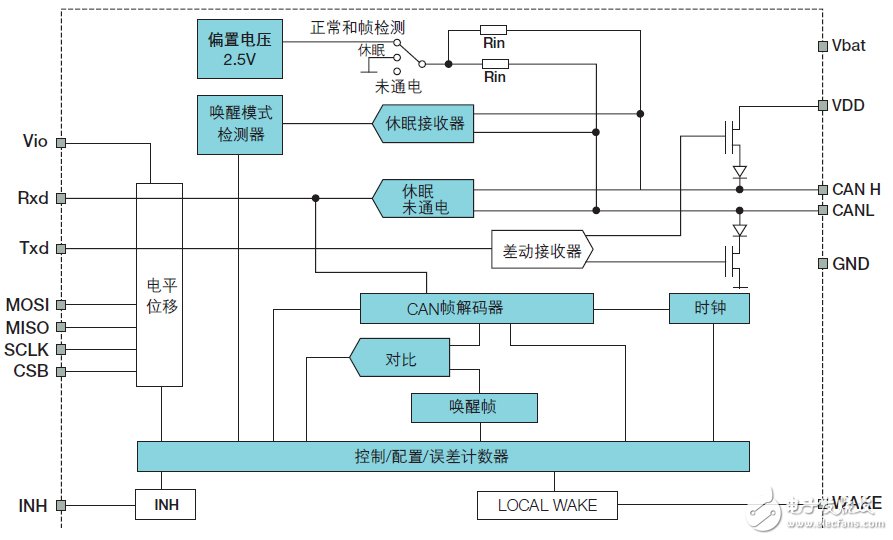
下图所示为CAN局部网络功能的典型结构图,采用市场标准引脚配置。灰色方框是CAN PN运行期间工作的部分,总计所需电流低于500微安。
执行局部网络功能的CAN收发器结构图
下表归纳了日后CAN收发器升级版的CAN FD的主要技术限制和影响。
技术汇总

在正常运行时,如ISO11898-2中所述,主要影响在于满足EMC技术规范的前提下, 满足CAN FD时不会降低相应的要求。
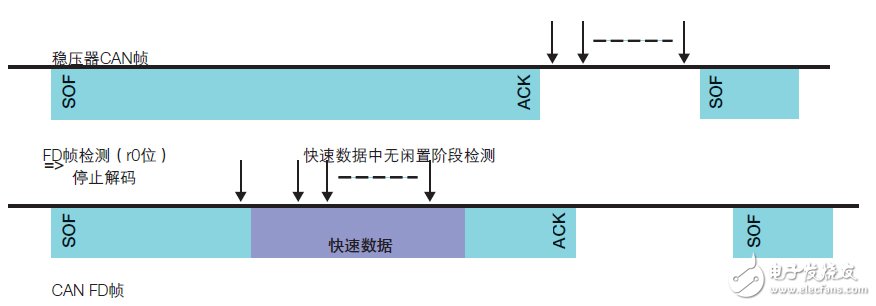
在局部网络运行中,如ISO11898-6所述,CAN FD不可干扰CAN输入报文检测,CAN PN收发器应当是“被动的可变速率”的。通过恰当检测CAN帧间间隔且适当区分快速数据段,可以达到上一目标。
常规数据帧和可变速率帧的对比
创新的反向集成
抗辐射和抗干扰、ESD稳健性、低功耗和CAN高速通信的更高波特率之间获得理想的权衡取舍,需要通过对模拟IC的每一种物理现象加以深入分析才能实现,正确的数据交互也同样如此。
市场向更高波特率的演变需求对期间的抗辐射和抗干扰水平产生了影响。这些要求需要在前期定义时就加以考虑,以便在提高性能的同时,不会降低可靠性。
飞思卡尔MC33901和MC34901 CAN FD收发器芯片拥有的高可靠性、极低的待机功耗,使得它在众多产品中独树一帜。飞思卡尔CAN物理层收发器拥有四个不同的型号,可以解决汽车(MC33901)和工业(MC34901)市场的各种挑战,提供配置或不配置总线唤醒选项(W版或S版)。
关于CAN PN,物理层需要模拟收发器的结构具有很低的功耗,这样可以抵御外部潜在的噪音干扰。再次声明,噪声模型与设计架构之间的一致性可以支持物理层拥有同样水平的EMC性能前提下,降低物理层收发器的功耗。
本文选自电子发烧友网7月《汽车电子特刊》Change The World栏目






















