CAN是博世公司开发的一种串行通讯总线,主要是为解决现代汽车中不断增加的电子器件相互间的信息交换问题。CAN总线的数据通信在工业应用中相比其他总线在可靠性、实时性和灵活性等方面具有较大优势,凭借其优良的性能及独特的设计,在嵌入式开发中有着广泛的应用。随着现代汽车电子网络化的不断发展,车载显示屏需要显示的内容也在不断增加。文中的车载显示屏采用的是WINCE操作系统,主处理器芯片是S3C6410,针对该处理器不包含CAN总线控制器,文中采用CAN总线控制器芯片MCP2515对该处理器进行接口扩展,并设计了WINCE系统下CAN的流接口驱动程序。
1 硬件设计
系统硬件电路如图1所示,其中主处理器芯片采用三星公司的S3C6410,CAN总线控制器和收发器分别采用MCP2515和MCP2551。

图1中SPIMOSI、SPIMISO、SPICLK和SPICS是处理器SPI接口的数据线和控制线,INT16是MCP2515的中断引脚,与处理器的外部中断引脚相连。S3C6410是一款采用ARM1176JZF—S内核的高性能32位处理器,其主频稳定工作在667 MHz,且芯片内拥有两路SPI串行总线控制器,这可实现与CAN总线控制器MCP2515的通信。
Microchip公司的MCP2515是一款带有SPI接口的CAN总线控制器。完全支持CAN V2.0B技术规范,该器件能发送、接收标准和扩展数据帧以及远程帧。MCP2515自带的两个验收屏蔽寄存器和6个验收滤波寄存器可过滤掉不必要的报文,并且内部包含了两个接收缓冲器和3个发送缓冲器。
MCP2551是一个可容错的高速CAN器件,可作为CAN协议控制器和物理总线接口。MCP2551可为CAN协议控制器提供差分收发能力,符合ISO-11898标准。
2 软件设计
基于WINCE的设备驱动目前有3种:本机设备驱动程序、总线驱动程序和流接口驱动程序。系统采用流接口驱动程序,工作结构框图如图2所示。

2.1 地址映射
在WINCE下,由于有MMU管理单元,因此不能使用物理地址,而只能采用虚拟地址(VA)来访问该寄存器,调用WINCE系统函数MmMapIoSpa ce()将物理地址转化为程序可直接访问的虚拟地址。
需要映射的物理地址为:PHYSICAL_ADDRESSioPhysicalBase={0,0};映射的地址长度为:sizeof(S3C6410_GPIO_REG);调用MmMapIoSp ace()函数:v_pIOPregs=MmMapIoSpace(ioPhysicalBase,sizeof(S3C6410_GPIO_REG),FALSE);然后可通过修改v_pIOPregs的值改变SPI寄存器,实现SPI通信。
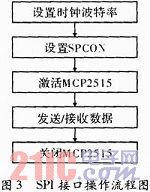
2.2 SPI接口编程
SPI接口一共有4个多功能复用引脚,可通过这些引脚的赋值来完成SPI接口的初始化工作,使其正常启动,从而MCU能够调用SPI接口函数实现对MCP2515的操作。接口函数主要南Spi_Write和Spi_Read组成。程序流程设计如图3所示。
2.3 CAN初始化
CAN控制器MCP2515正常运行之前,需要完成初始化。初始化工作是在函数Init_MCP2515内完成的。首先设置CAN通信的波特率,随后屏蔽中断,设置屏蔽和接收寄存器,接着是清除接收和发送缓冲区,最后打开中断。
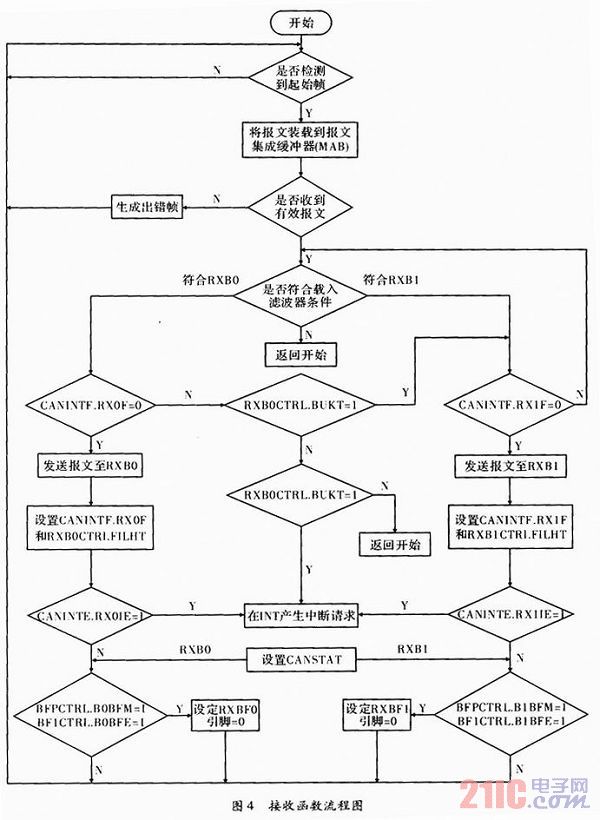
2.4 CAN收发实现
根据CAN通信协议的特性,CAN的收发程序中均包含标识符(ID)和数据。下面介绍了接收程序,在MCP2515中包含了两个接收缓冲器RxB0和RxB1,且每个接收缓冲器配有多个验收过滤寄存器。文中在中断方式下,通过设置验收过滤寄存器对符合条件的报文数据进行接收,函数流程设计如图4所示。
2.5 流接口函数编写
MCP2515的流接口驱动程序编译后生成DLL,然后建立CANBus.def文件将其中的接口函数导出。这一文件中包含CAN_Init()、CAN_IOCon trol()以及CAN_PowerUp()等一组标准函数,这些函数是用于完成标准的文件I/O函数和电源管理等。最终要将此文件添加到本驱动程序的工程中。
因此在对设备进行读写操作时,首先要先通过CreatFile()函数凋用CAN_Open()打开设备,在此过程中CAN_Open()函数用到了初始化函数CAN_Init()返回的句柄,而CAN_Read()和CAN_Write()函数需要CreatFile()成功执行后返回的句柄。在应用程序中可通过ReadFile()和Write File()函数来调用CAN_Read()和CAN_Write()来对设备进行读写操作。
2.6 注册表
具体的流接口驱动程序和注册表是分不开的,在WINCE内核中添加注册表文件CANBus.reg,内容为
[HKEY_LOCAL_MACHINE\Drivers\BuiltIn\CANBus]
“Prefix”=“CAN“
“Dll”=“CANBus.dll”
“Order”=dword:1
“Index”=dword:1
3 结束语
讨论了ARM11处理器S3C6410的CAN总线接口扩展的方法,利用该处理器内部集成的SPI接口扩展,设计出了详细的硬件电路,并设计了基于WINCE系统的CAN接口流驱动程序。试验验证CAN网络通信完全正常,证明了该方案的可实施性。