描述:
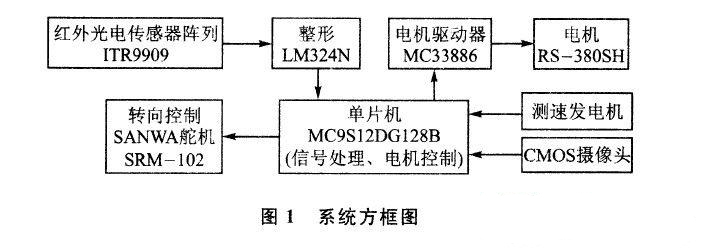
我们设计的智能寻径小车主要由路径检测、转向控制、电机驱动、车速检测和电拥管理等 功能模块以及软件控制算法组成。小车以16位单片机MC9S12DG128B 为 核心控制器,根据黑色与白色反射率的不同.采用红外光电传感器的阵列对路径(黑线)进行主 要的识别,再将检测信号送入单片机,通过比例控制实时修正控制舵机的PWM波占空比,以 实现电动车的平滑转向,使电动车沿黑线自主运动。同时辅以CMOS 摄像头来预测路径的变 化,以此来对速度进行分级设定。而对电动车的速度调节是以脉冲宽度调制(PWM)控制方式 来实现,其采用数字闭环的方式.将测速发电机的电压通过A/D 转换后作为反馈信号,以模糊 控制算法对电机的转速进行实时调节.实现其速度的调节。小车的整体设计框图如图1所示。
以下为各模块电路:
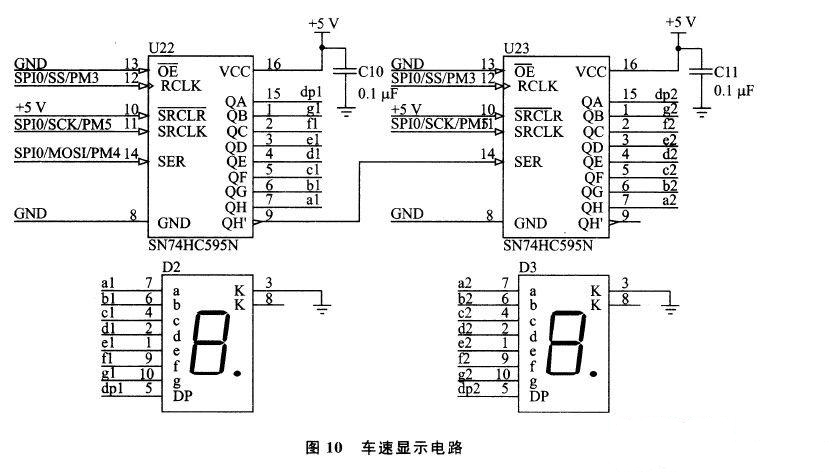
车速显示电路
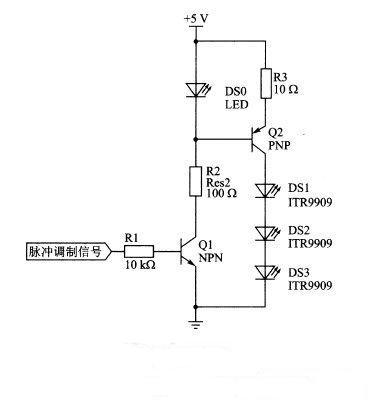
红外发射电路
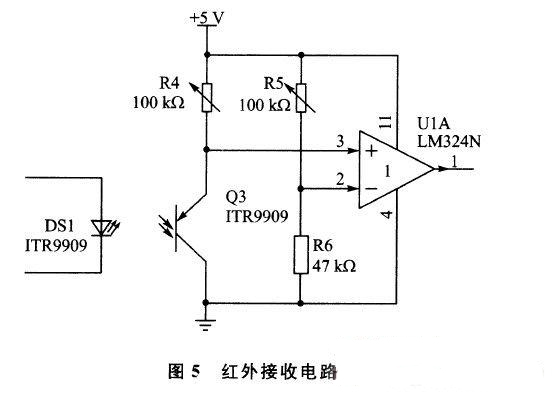
红外接收电路
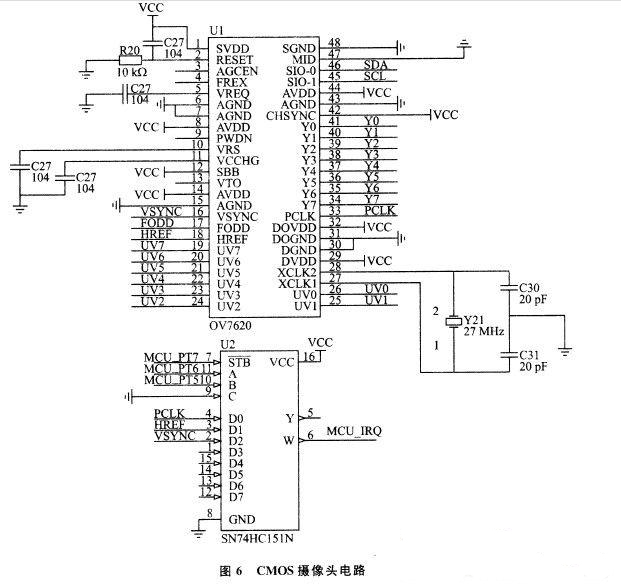
CMOS摄像头电路
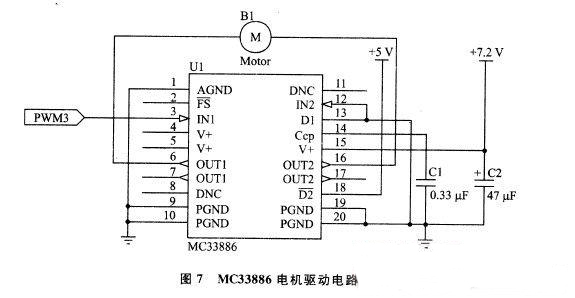
MC33886电机驱动电路