摘要:提出了一种新的基于滞环跟踪控制的LED驱动电路设计方法。它通过设定的阈值电压来控制流经电感的峰值和谷值电流,从而精确控制LED的平均电流值。经过对滞环比较跟踪方法控制的LED驱动电路进行理论分析与计算,并对驱动电路进行了时序仿真,软件仿真结果符合理论计算,验证了理论分析的正确性。滞环跟踪控制的LED驱动电路较好地解决了峰值电流控制的平均电流与峰值电流不一致的问题,且电路具有自稳定性,故无需额外斜坡补偿电路。
关键词:LED;峰值电流控制;滞环跟踪控制;PSIM
大功率白光LED由于其的高效率、长寿命、环保、可平滑调光等特点,己成为先进的固态照明光源,它已应用于普通照明、液晶电视,街道和停车场等离线照明场所。对于LED驱动方式而言,每种LED驱动都有它的适用范围,也有它们各自的优缺点,搞清楚各自的优缺点,可以更好地根据实际情况,设计合理的LED驱动电路。这可以通过效率、工作电压、噪声干扰、输出调节、反应速度以及安装尺寸和成本来进行比较分析。由LED的电流一电压特性可知,在正向导通压降有一个较小变化时,将会引起导通电流产生较大的变化,从而引起LED亮度不稳定,所以需要采用恒流控制的方式来驱动LED,通过精确控制其电流值可以均匀调节亮度,这对大功率LED尤其重要。恒流驱动的控制方法主要有电阻限流,线性调节控制,DC—DC控制等多种方法。电阻限流和线性控制都能获得较好的恒流特性,但由于其效率过低,故较少采用,DC—DC控制由于其高效率和高灵活性而得到广泛的应用。
目前广泛应用的开关控制模式是峰值电流检测PWM模式,通过检测开关管导通时通过LED的峰值电流大小,触发开关管驱动的电平翻转,并在固定时刻导通,所以可以通过控制取样电阻的峰值电流大小来控制LED电流平均值。但这种驱动方式存在平均电流和峰值电流不一致的问题,针对上述不足,文献提出了基于电流平方控制的方法加以解决。但是由于电路还存在次谐波震荡问题,当占空比大于0.5时,需要对电路进行斜坡补偿,否则电感电流将不稳定。增加斜坡补偿电路可以克服上述不足,但却增加了电路的复杂程度。为了解决上述问题,本文提出了基于滞环比较跟踪控制的LED驱动电路的设计方法,它是一种非线性砰一砰控制方法,该方法具有结构简单,响应速度快,参数鲁棒性好等优点,在控制领域的应用极为广泛。
1 电路原理及设计
电路整体由三个部分组成:主电路、电流检测电路和滞环跟踪控制电路。当开关管导通时,续流二极管反向偏置截止,电感电流线性增加,取样电阻R10两端电压差变大,将此电压差通过差动放大电路,反馈到滞环控制电路,与滞环控制设定的阈值电压相比较。当电压达到滞环跟踪控制系统的电压的上限值时,比较器输出电平翻转,关闭开关器件,由于电感电流不能突变,此时感应出一个反向电压,续流二极管正向偏置导通。电感、二极管和负载形成回路,电感放电,当放电电压低于滞环跟踪控制系统的电压的下限值时,比较器电压翻转,开关器件导通,循此反复,限制了电感电流的峰值和谷值,达到了限定LED电流平均值的目的。
1.1 主电路设计
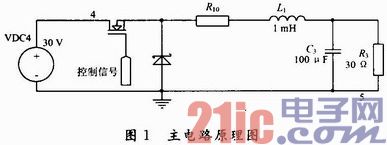
图1所示为驱动电路的主电路原理图,由30 V的电源、开关器件和续流二极管组成,取R3=30 Ω的电阻代替LED器件,由L1=1 mH的电感和C3=100μF的电容组成DC—DC电路。
1.2 电流检测电路设计
图2为高边电流检测电路,通过检测R10的电阻二端的电压差值可以检测电感电流的峰值和谷值。电路为减法运算放大电路,设置R11/R13=R12/R14,则:
Vout=(R14/R12)(Vin0-Vin1) (1)
所以当R14=R12时,R10两端的电压为Vout。通过设定比例可以使电路电流按同比例变化。
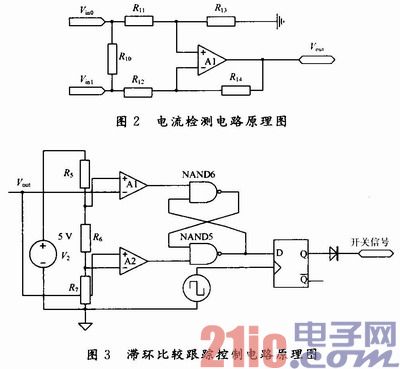
1.3 滞环比较跟踪电路设计
图3所示为滞环跟踪控制的电路原理图,由运算放大器和电阻组成的电压比较前级,与非门组成的RS锁存器以及消抖D触发器。Vo1为滞环控制电压的上限值,Vo2为滞环控制电压的下限值。当输入电压小于Vo2时输出滞环输出为1,使开关器件导通;当电压在Vo1~Vo2之间时为保持状态;当输入电压高于Vo2时滞环输出为0,使开关器件关闭。如此反复,即可完成对电流的跟踪控制作用。由于电路频率抖动范围过大,电路输出连接D触发器,降低滞环的抖动频率,f≤CLK。
由图可知电压阈值:
Vo1=V(R6+R7)/(R5+R6+R7) (2)
Vo2=VR7/(R5+R6+R7) (3)
因此可以通过调节R5,R6和R7来调节阈值电压,从而实现输出恒定电流值的调节。电路电流平均值等于流过取样电阻的平均值。即:Iled=IR10。
IR10=R14/R12·(Vin0-Vin1)/R10=(Vo1+Vo2)/(R14/R12)/R10/2 (4)
滞环电流范围是:
△I=(Vo1-Vo2)·R12/(R10·R14) (5)
2 滞环跟踪控制驱动电路仿真分析
为了验证以上分析,本文采用仿真软件PSIM 6.0对该电路控制方法进行时域仿真,电路的基本参数为:V1=30 V,V2=5 V,R5=100 kΩ,R6=50 Ω,R7=700 Ω。L=1 mH,C=100μF,R10=0.1 Ω,R11=R12=R13=R14=10 kΩ,CLK=500 kHz,其中大功率LED等效为R3=30 Ω电阻负载。
由式(1)~式(3)可得表1。
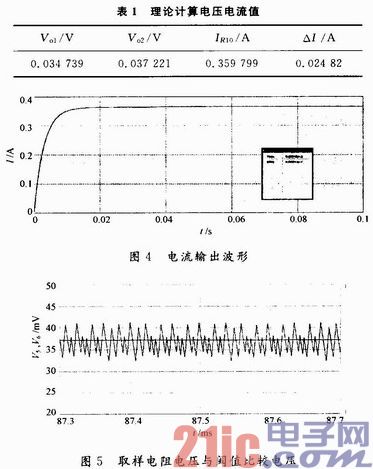
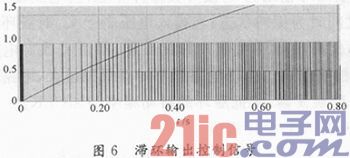
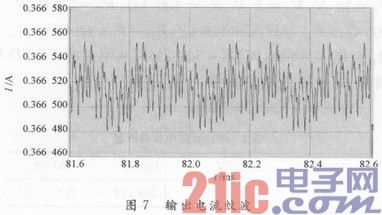
由仿真波形图4可得稳态电流为366.5 mA,与理论相差6.5 mA,相对误差为1%。精确的控制了LED的平均电流,并且纹波电流小于0.01 mA,开启电流缓慢上升,具备电路软启动的功能,对电路起到了很好的保护。图5和图6可知由滞环跟踪控制的输出电平脉宽宽度能很好的跟踪电感峰值电压,实现输出恒定的电流值。但由于系统的延时,电感电压会略超出或略低于阈值电压。
经进一步仿真,当输入电压在10~100V之间变化时,输出电流变化小于10 mA。当输出负载为10 Ω、20 Ω和30 Ω的时,电流变化同样小于10 mA。系统能稳定工作,表明电路具有很强的自稳定性。
3 结语
滞环比较跟踪控制的LED驱动电路通过调节阈值电压范围可以精确控制LED的平均电流值,很好地满足了大功率LED对电流的要求;它还解决了峰值电流控制的平均电流与峰值电流不一致以及需要额外补偿电路的问题。通过仿真分析可知,电路的平均电流值稳定,纹波电流小,并且具备软启动的特性,能满足对色温要求很高的大功率LED驱动电路的要求。滞环比较跟踪控制的LED驱动电路具有响应速度快,系统鲁棒性好,改善了电路的启动特性,适应宽范围内电压的输入和负载变化较大的场合等显著优点,而且由于电路具有自稳定性,故电路无需额外斜坡补偿,使电路变得相对简单。