引言
20世纪90年代以来,随着人们对汽车动力性、舒适性、经济性要求的提高,汽车上的电控系统的数量越来越多,增加的ECU及其通信设备使汽车电路复杂程度增加,相应地降低了汽车的可靠性。这就要求必须采用能够满足高速、多路的复用通信网络,以共享的方式传送多种控制信息。
目前汽车上普遍采用的汽车网络有:局部互联网络L IN (Local interconnect network)、控制器局域网CAN(Controller area network或称现场控制总线)。正在发展中的汽车网络技术还有高速容错网络协议FlexRay ,用于汽车多媒体和导航的MOST ,以及与计算机网络兼容的蓝牙、无线局域网等无线网络技术。文中主要侧重于已得到众多汽车制造商推崇的网络技术———CAN总线和L IN总线技术。
CAN总线、LIN总线简介及各自通信协议
CAN总线及LIN总线简介
CAN网络属于总线式串行通信网络。其最高速率可达1Mbps(40m) ,以多种方式工作。与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性,是目前使用最广泛的一种汽车网络。
L IN网络是一种低成本的串行通讯网络,用于实现汽车中的分布式电子系统控制。L IN的目标是为现有汽车网络(例如CAN总线)提供辅助功能。因此,L IN总线是一种辅助的总线网络。在不需要CAN总线的带宽和多功能的场合,比如智能传感器和制动装置之间的通讯使用L IN总线可大大节省成本(为CAN总线所需成本的1/ 3~1/ 2)。目前L IN已经成为国际标准,被多数整车厂商和配件厂商所接受。
L IN的主要特点如下:低成本、基于通用UART接口;传输速率最高可达20kbps ;单主控制器/多从设备模式,无需仲裁机制;从节点不需晶振或陶瓷震荡器就能实现自同步,节省了从设备的硬件成本;保证信号传输的延迟时间;不需要改变L IN从节点的硬件和软件就可以在网络上增加节点。通常一个L IN网络上节点数目小于12个,共有64个标志符。
CAN总线通信协议———J1939通信协议
J1939协议以CAN 2. 0B为基础,是CAN总线的应用层协议。J1939协议将CAN标识符划分为如下几个部分:优先级( P)、数据页( PGN)、协议数据单元( PDU)格式、PDU特定域(PS)和源地址(SA)。J1939/ 71应用层文档定义了车辆控制的各种参数及命令的PGN。表1为J1939的报文格式。
表1J1939协议报文格式

LIN总线通信协议
L IN协议是一种建立在通用的SCI或UART硬件接口上、用于将车辆中分布的智能传感器和执行器连接到车内主控制器的单总线(12V)串行通信协议。
通过L IN总线传输的实体为帧。一个报文帧由帧头以及回应(数据)部分组成。在一个激活的L IN网络中,通讯通常由主节点启动,主节点任务发送包含有同步间隙的报文头、同步字节以及报文标志符( ID)。一个从节点的任务通过接收并过滤标志符被激活,并启动回应报文的传送。回应中包含了1到8个字节的数据以及一个字节的校验码。图1为L IN协议帧结构。
总体通信网络设计
整车通信网络设计
汽车内ECU间的数据传输特征主要差别在于数据传输频率,美国汽车工程师协会(SAE)将汽车网络根据速率划分为A (低速: 1kbps~10kbps)、B (中速: 10kbps~100kbps)、C(高速:最高位速率可达1Mbps) 3个等级。在一个完善的汽车电子控制系统中,许多动态信息必须与车速同步,每个ECU对实时性的要求是因数据的更新速率和控制周期的不同而不同的。例如:一个8缸的柴油机运行速度为2400r/ min ,电控单元控制两次喷射的时间间隔为6. 25ms ,其中,喷射持续时间为30°的曲轴转角(2ms) ,在剩余4ms内需完成转速测量、油量测量、A/ D转换、执行器的控制等一系列过程,这就意味着数据发送与接收必须在1ms内完成,才能达到柴油机电控的实时性要求。同时,这也就要求其数据通信网是基于优先权竞争的模式,且本身具有极高的通信速率。CAN总线技术正是为满足这些要求而设计的。
然而在A类通信网络中,进气温度的参数允许响应时间为20s ,冷却温度的参数允许响应时间1min ,燃油温度的参数允许响应时间约10min (上述3个信号每隔100ms或1min采样一次就完全足够了) ,前后车灯开关、座椅调节、车门开闭的传输延迟为10~100ms ,如将这些较为简单的ECU节点挂在L IN总线上,则既实现了网络分级控制,同时也降低了车辆电子系统的开发、生产和服务的成本。
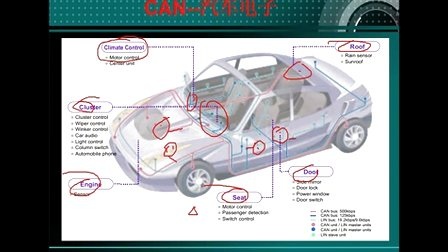
如图2所示,文中将数据传输速率较高的CAN总线(1Mbps)用于B、C类网络,其控制对象为:发动机控制器、自动变速器、驱动防滑系统、牵引力控制系统、ABS/ ASR、安全气囊控制器及组合仪表信号的采集系统等。L IN总线用于A类系统,最高传输速率可达20kbps。其控制对象主要为:前后车灯控制开关、电动座椅开关、中央门锁与防盗控制开关、后视镜、空调、车窗控制开关等。这些控制对象对信息传输的实时性要求不高,但数量较多。采用L IN总线可提高抗干扰能力、增加总线传输距离、降低成本。以门窗控制为例,在车门上有门锁、车窗玻璃开关、车窗升降电机、操作按钮等,只需一个L IN网络就可以实现。
CAN总线和L IN总线相互独立,通过中央控制器实现资源共享并进行数据交换。中央控制器是整车管理系统的核心,它同时也是CAN总线和L IN总线的网关服务器,它的主要功能就是对各种信息进行分析处理并发出指令,协调汽车各控制单元及电器设备的工作。
接口设计
整车通信网络是由许多CAN节点和L IN节点通过CAN总线和L IN总线连接组成的一个局域网,因此接口设计十分重要。
图3为中央控制器与CAN总线、L IN总线接口设计。中央控制器内包括了一个CAN的控制器和一个SCI接口。CAN智能节点一般由MCU ,CAN控制器和CAN收发器组成。
目前从事CAN总线及L IN总线芯片开发和制造的厂商很多,如PHIL IPS ,FREESCAL E ,ONSEMI , TI等,设计人员可以根据自身需要选择不同的芯片组合。这里中央控制器选择了FREESCAL E的MC68HC908AZ60芯片。该芯片是专为汽车电子应用设计的功能强大的8位单片机,内部集成了低速CAN控制器,支持CAN2.0A/ 2. 0B ,具有一个SCI模块。该芯片除了完成L IN网络与CAN网络的通信连接外,还兼有其它的控制功能。
L IN节点选择了FREESC2AL E的器件。其中L IN节点收发器采用MC33399 ; L IN节点MCU选择MC68HC805 PV8。由于汽车上的电磁干扰较大,为提高系统的抗干扰能力,在CAN控制器和CAN收发器以及L IN控制器和L IN收发器之间增加了由6N137构成的光电隔离电路。
CAN智能节点选择PHIL IPS器件: PCA82C250作为CAN收发器; CAN节点的MCU选用P89C591 ,因P89C591内部集成有CAN控制器(有PeliCAN接口) ,所以没有再选择CAN控制器,其连接图如图4所示。设计人员也可以选用微控制器+外接CAN控制器这样的连接法。
PCA82C250提供对总线的差动发送能力和对CAN控制器的差动接收能力。在低速和总线长度较短时,一般采用斜率控制方式,以限制上升和下降斜率,降低射频干扰,斜率可通过调节由引脚8至地连接的电阻进行控制。通信信号传输到导线的端点时会发生反射,反射信号会干扰正常信号的传输,因而总线两端需接终端电阻,以消除反射信号。其阻值约等于传输电缆的特性阻抗。
总结
基于CAN总线A类车身控制在汽车上已有广泛应用。随着车上总线节点的增加及高性能系统向中、低档汽车的发展,CAN总线相对较高的实现成本就成为一种障碍。与CAN相比,L IN节点的通信成本是CAN的1/ 3~1/ 2 ,具有较明显的成本优势。文中的汽车通信网络将L IN应用于车身系统,既实现了应有的网络控制功能,又降低了开发、生产、服务的成本,具有较高的实用性。