步进电机驱动
1) 基本参数
误差估计:
极轴偏角5度,跟踪20分钟,最大偏差角0.5度,平均偏离速度=1.5角秒/秒;
极轴偏角2度,跟踪20分钟,最大偏差角0.2度,平均偏离速度=0.6角秒/秒。
正常跟踪速度15角秒/秒,最大寻星速度60X=15度/分
2) 蜗轮总减速比8640,步距角1.8度;0.75角秒/步。
从机械角度讲不需要细分.出于通用性的考虑和为了避免共振效应支持半步驱动。
3)速度自调整模式:
4) 变速过程控制
对于恒定力矩,角加速度为常数。对应计数步长均匀增加。初步定为128倍速/2分钟。(2002-03-31)
2002-4-3
首次搭建电路试验。6线步进电机同相线圈串接,总电阻60欧姆。电机指标不明,但属于比较通用的一种。使用12V电源恒压驱动方式,实测25倍速以内力矩未下降;30倍速电机仍然运转但力矩下降。
2002-4-5
改为使用单线圈驱动。串接电阻下降到1/2,而电感则下降到1/4到1/3,从而改善了L/R值,减少了时间常数。电极转速达到了50倍速,在40倍速下仍然有足够的力矩输出。使用半步驱动降低噪音。使用开环PWM方式调节电流。
步进电机驱动试验
对两种步进电机驱动电路的效果进行的试验。
1)L298单片步进电机驱动IC
2)TA8435单片8细分步进电机驱动IC
两种IC的外围电路都非常简单,试验线路板见下图:
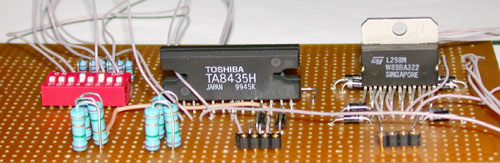
选择了2个步进电机作实验。左为7v/12ohm/phase,3.6deg/step;右为12v/30ohm/phase,1.8deg/step。

2个电机在不同驱动下的空载启动和达到正常力矩的转速测试结果如下:(正常力矩只是凭手感,并不准确。)
电机 IC 脉冲频率(Hz) 细分数 倍速 1.8deg/step 8435 8594 8 54 空载启动 8138 8 51 正常力矩 4400 4 55 空载启动 4218 4 53 正常力矩 2179 2 54 空载启动 2071 2 52 正常力矩 1038 1 52 振动无力 957 1 48 无振动 937 1 47 正常力矩 298 1843 2 46 空载启动 1639 2 41 正常力矩 3.6deg/step 8435 5895 8 74 空载启动 5474 8 68 正常力矩 2957 4 74 空载启动 2705 4 68 正常力矩 1293 2 65 空载启动 1244 2 62 正常力矩 718 1 72 空载启动 660 1 66 正常力矩 298 1292 2 65 空载启动 1171 2 59 正常力矩