0 引言
三维显示是对客体固有三维信息进行记录、处理和再现的可视化过程。目前国外的体三维显示研究主要有激光扫描双红外光子上变频技术、基于高速声光扫描器和旋转螺旋屏的激光扫描系统,采用快速空间光调制器的螺旋屏投影系统等,而这些技术实现起来较困难,而价格也较贵。本文利用发光二极管阵列实现了具有个体像素,空间尺寸为柱体
内的三维显示,文中介绍了LED三维显示系统的工作原理、论述了系统结构、并给出实际显示效果。
LED(Light Emitting Diodes)显示技术是指将光电、计算机以及控制等相关内容综合于一体的现代新技术。它与传统的广告宣传紧密结合成为一种新的媒体宣传工具,广泛应用于展览中心、金融市场、体育场馆、机场、码头、车站等公共场所的信息显示和广告宣传。
1 LED三维显示系统原理
研究表明,人眼视觉暂留时间约为50—200ms,即人类视觉对亮度改变的跟踪会由于意识处理延时而滞后。当实际光源闪烁频率超过5Hz时,给人的感觉是连续发光体而非闪烁体。基于人眼视觉暂留特性,设计了如图1所示的体三维显示系统结构简图。

当发光二极管阵列屏在电机驱动下高速旋转,周期性地扫出一个柱体空间,阵列上的发光二极管旋转后提供分散于三维空间中的体显示介质,从而形成虚拟的体像素。为了便于理解,我们可对其进行空间分解,见图2所示。
图2(a)-图2(d)分别表示连续个单位时间间隔内,左侧发光二极管阵列显示的二维信息,图中黑点表示发光二极管处于发光状态。由于视觉暂留,观察者感知的不是上述图2(a)-图2(d)的离散二维图像序列,而是一幅复合后的空间整体图像,如图2(e)示。
2 LED三维显示系统设计
由图l可见,LED三维显示系统包括LED显示屏部分、电源及电机部分、无线输电部分、红外对管等部分,下面对这些组成部分进行简单介绍。
2.1 LED显示屏
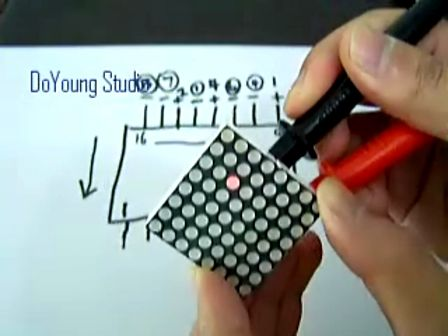
我们这里只是介绍原理,所以以8*16的低分辨率的LED显示屏为例,高精度大型LED显示屏的设计与此类似。
为了提高显示屏旋转时人眼对灯体的透视度,不采用将LED灯直接焊接在电路板上的方案,而是将LED的管脚直接串联焊接起来,并将LED其中的一个管脚折弯90度,然后再将所有的LED灯的管脚焊接起来,形成镂空的显示屏,如下图3所示。
LED显示屏的驱动电路如图4所示。图中左端为三极管,三极管除了可以当做交流信号放大器之外,也可以做为开关之用,这里用来控制LED阳极(图3中的 H1到H8)。中间部分为所选单片机,同样,这里我们只是做原理介绍,所以可简单选择常用的89C52单片机。最右端为74HC1385译码器,用来控制点阵屏的阴极(图3中的H11到H26)。当做大的LED显示屏时,可适当增加三极管和74HC1385译码器即可。
2.2 电源及电机
电源的选择应该根据用电设备的电气参数来选择,此处电源输出分为两部分,一部分给直流电机供电,另外一部分则给无线输电供电,这两部分的电压要求分别是12V、5V。所以这里采用线性电源,见图5所示。
对于电机的选择,若选用步进电机,当电机高速旋转时,一旦发生抖动现象,会有很严重的失步,而且步进电机随着转速的提高力矩会变小,所以这里选用直流电机。不过,直流电机的选用要符合显示屏的最低转速,也就是说在人眼的视觉暂留的时间内一定要转完一周,而且要求电机的力矩尽量大,于是可选用了12V RS-360SH直流电机。
2.3 无线输电
由于不方便在电机上部放置电池,所以上部显示屏的供电采用由下面的电源向上无线输电,其电路图如图6所示。
2. 4 红外对管
由于该系统采用的是直流电机,不能实时定位,所以我们就要给LED显示屏一个坐标,用来给显示屏自我定位,因为电机上下部分靠的较近,所以我们就采用易于控制的光电对管TCRT5000,其控制电路如图7所示。
3 显示效果
我们选择与转轴不共面的斜向直线、绕轴匀速上升的螺旋线、以转轴为几何对称中心的立方体线框图为实验显示对象。实验结果表明,待显对象出现在预定体积空间内,观察者无论从水平360度范围内的哪一角度平视,还是从系统上方俯视或侧视,均可看到不同角度及高度的三维信息。图8和图9是显示的两种3D图形:正方体和高脚杯,限于篇幅不再列举其他的3D图形。
4 总结
空间显示在真实空间中产生体素或虚体素,众多分散的体素和虚体素构成三维图像被人眼所接收,形成立体视觉。形成的三维图像宛若浮在真实的三维空间中,可多人、多角度、同时、裸眼观察,无需任何助视仪器。大显示空间的空间三维显示系统需要海量的数据吞吐和高超速的空间寻址,而LED拥有高响应速度近朗伯体发光等优良的特性,采用LED作为屏幕介质是实现大空间的空间三维显示不二选择。