8.损耗与效率测量
对任意系统,要想对其损耗和效率进行测量,最好对系统输入和输出进行同步测量,如图11 所示。
<ignore_js_op>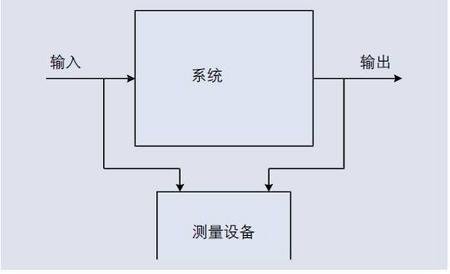
图11. 效率测量图
对于高效系统( 如脉宽调制驱动器) 来说,这一点特别重要。这是因为,如果对输出和输出分开测量,而且在测量之间关闭系统来切换仪器,那么就不能始终确保两个测量具有完全相同的负载条件。如果忽视负载条件的任何差异,那么都会导致测得损耗的误差。
例如:
设置Number 1 — 测量输入。
<ignore_js_op>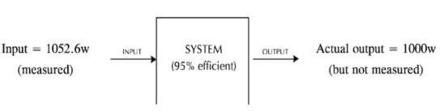
关闭系统,重新连接输出测量,并再次开启系统:
设置Number 2 — 测量输出( 但条件稍微变化)。
<ignore_js_op>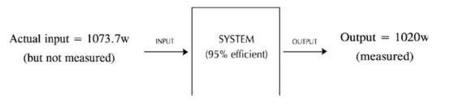
表现损耗 = 1052.6 W - 1020 W = 32.6 W
实际损耗 = 1073.7 W - 1020 W = 53.7 W
这说明测得的损耗误差非常大!
为了避免这类误差,您可以使用4 通道仪器,如PA4000 功率分析仪,它能够对驱动器输入和输出同时进行两表法测量,如图12所示。
<ignore_js_op>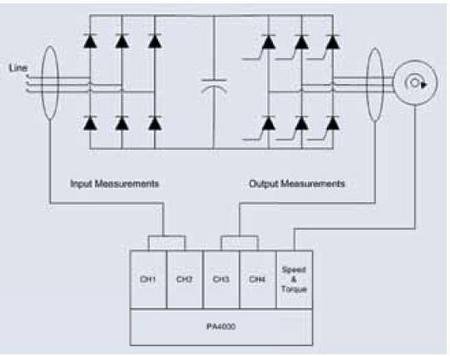
图12. 利用两表法实现PA4000 与驱动器输入、输出端连接
使用这个方法将确保精确测量,即使输入和输出测量之间的条件可能稍有变化。条件的稍微变化无关紧要,因为每次效率测量都是同步测量。
9.进行连接
对马达驱动器进行电压连接通常只是小事一桩,因为对各相之间电压进行测量。进行电流连接则更具挑战。进行电流连接主要有两种方式。第一种是方式“分割”导体,并使电流通过电流分流器,然后测量电流分流器两端电压降。虽然这种方式在地功率情况下可行,但当电流较高时,则行不通。
对于大电流,可能使用电流传感器。通常,这涉及到使初级电流载流导体与电流测量设备相连。测量设备生成一个与初级电流成比例的次级电流。
一般情况下,这需要通过电流测量装置的初级载流导体传递。测量设备创建一个与初级电流成比例的次级电流。
为什么使用电流传感器?
使用电流传感器的原因主要有3个:
1. 正在测量的信号可能与测量设备不兼容。例如,大部分测试台仪器无法测量超过100 A 的电流,而这么大的电流是大型马达和驱动器中常见的。
2. 消除测量仪器与测量信号的耦合。在脉宽调制驱动器中,快速开关电压(dV/dt) 往往造成正在测量的输出信号具有很大的共模分量。高共模电压给电流测量带来不确定性。使用电流传感器隔离分析仪的电流输入和电压波动,从而消除因共模引起的不确定性。
3. 为了便利和安全。在马达系统中往往存在高压,而且电源阻抗往往极低。如果连接不正确,可能造成大量能量流动。
选择正确的电流传感器
电流传感器有许多种,在马达测量中使用的4 种最常见电流传感器是:
1. 电流钳
2. 闭环霍尔效应
3. IT 型闭环
4. 电流互感器
为了在马达驱动器的典型信号带宽中实现最佳性能,应使用闭环传感器。在驱动器输入中可以使用电流互感器和电流钳,但在驱动器输出中效果则不好。这是因为电流互感器在低频(低驱动速度)性能不佳,而且将限制测量与开关有关高频频率的能力。
当选择传感器时,重要的是考虑正在测量的信号和测量设备。选择与需要测量的最大信号(包括峰值)相对应的最大输入范围传感器。这将充分发挥传感器范围的效用。
您还希望对测量设备而言,在不引起过冲的前提下,传感器输出信号尽可能大。输入信号越大,信噪比越高,测量结果越好。
使用电流传感器
对于闭环霍尔效应电流传感器,应当谨慎进行连接。将为传感器提供电源。电源通常包括正电源和负电源,而且必须提供足够电流,通常为10mA ~ 50mA。
传感器应当尽可能靠近测量仪器,以降低次级引线的电压和磁场耦合。
传感器输出是单一电流输出,信号和电源公用回路。该输出应当直接与测量设备电流输入的高端连接。测量设备电流输入的低端应当连接至与传感器电源相同的回路。而且,所有引线应当尽可能短。输出应当靠近电源连接。从理想角度看, 3 条线应当绞合在一起。
在脉宽调制驱动器环境中,在需要情况下,接地和屏蔽是一个好习惯。在低连接中使用可叠堆4mm 将使低连接很容易接地。
屏蔽电缆将改进性能。屏蔽将接地,并与传感器电源公共端相连,而且,在相应的地方,它将与传感器接地相连。屏蔽将保护电源连接与信号。
如果初级载体中电流占额定电流百分率较低,或者同测量仪器可用的电流量程相比,传感器输出较低,那么通过让电流多次通过传感器核心,可以改进电路性
能。
例如, 如果您只有1000A 输入、1A 输出(1000:1)传感器,但您希望测量10A 电流,且输出电流只有10mA。为了更好地使用测量系统,使初级导体通过传感器10 次,将使输出电流增加至100mA。从初级载体角度看,初级电流从10A 增加至100A。
对于不同类型的电流传感器,为正确地读取电流,需要对测量仪器进行比例缩放。以1000:1 电流传感器为例,实际测量的电流是真实电流的1/1000。因此,电流输入需要扩大1000 倍。
电流传感器与PM4000 一起使用
PA4000 的设计目的是与外部传感器一起使用。其设计特性包括:
1. 可选择+/-15V 电源,与许多常用的闭环电流传感器一起使用。
2. 每通道电流单独缩放。
3. 后面板接地连接,简化电流测量低连接的屏蔽与接地。
4. 内建1 Arms 分流器,非常适合电流传感器输出。
如果您正在使用泰克电流钳或变压器,那么这些设备输出是4mm 安全香蕉插座。电缆可以直接插入PA4000 的电流分流器。由于电流传感器或电流钳的典型输出低1A,内建1A 分流器是个不错的选择。
为了获得精确的测量,只需要为仪器配置两个参数:
1. 分流器选择。这是在每组基础上设置的。
2. 电流输入比例因子。这是在每通道基础上设置的。比例因子是:

如果您正在使用闭环电流传感器,那么需要向传感器提供电源。PA4000 内置的可选择±15V 电源非常适合这个功能。PA4000 的+15V 和-15V 电源必须与电流传感器连接,参见图13。
<ignore_js_op>
图13. 使用闭环电流传感器与PA4000 功率分析仪连接
传感器输出必须连接至通道1 的AHi 或A1A 连接器。由于闭环传感器输出往往低于1A,因此A1A 连接器通常是更好的选择。电流通道的Alo 连接器必须与传感器电源连接器的公共端相连。
为了获得最佳性能,3 个连接器应当绞合在一起并进行屏蔽,屏蔽连接至传感器电源公共端。传感器电源公共端应当与PA4000 后面板的接地端相连。
10.动态负载条件下的驱动器性能
脉宽调制驱动器的功耗和输出特性随着马达负载变化。虽然您的测试协议可能调用具体线路或负载条件下的测试 ,但您可能还需要检查变化条件下的功率特性。对负载变化期间的功率特性进行分析可能产生大量数据,不过,有了适当的软件和相配的分析仪,您可以随着负载或其他条件变化,利用计算机来搜集和分析测量数据。
在这些应用中,功率分析仪就像一个精密测量系统,快速向计算机反馈数据,并存储数据,用于进一步分析。
图14 给出泰克PWRVIEW 软件收集的来自PA4000功率分析仪的测量数据,PA4000 利用单相线路输入和三相驱动器输出与脉宽调制驱动器相连。除了收集数据,该软件还允许您对分析仪进行控制,这样可以在计算机上对其进行配置。图15 给出三相输入读数的实例,包括详细的电压、电流和功率谐波图。
<ignore_js_op>
图14. PWRVIEW软件显示出脉宽调制马达驱动器的多个功率参数。
<ignore_js_op>
图15. 记录随时间变化的测量数据,并绘制图表( 如这里所示的Microsoft Excel)。该图给出马达启动期间的测量数据。
11.结束语
目前,脉宽调制马达驱动器正成为变速马达控制的主要方法,不仅用于工业领域,而且用于电动汽车和家用空调机等诸多领域。脉宽调制驱动器产生复杂波形,无论是其输出至马达,还是为驱动器提供电源。泰克PA4000 功率分析仪利用业界首创的螺旋分流(SpiralShuntTM) 技术以及动态频率同步技术解决这个问题,实现对驱动器基频的稳定跟踪。
这项技术加上脉宽调制输出的特殊运行模式,可提供持续的精确测量。该技术对数据进行高速采样,对其总体数量( 包括所有谐波和载波分量) 进行实时计算。与此同时,它对采样数据进行数字化滤波,提供低频测量,如基频测量和输出频率测量,使得PA4000 成为脉宽调制驱动器测量的理想解决方案。
![[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用](/Uploads/2014_12/video/vi8fc8d028840bfa6c191d73d8eafcc08b_s.jpg)

























