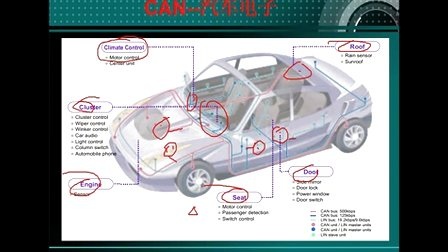
大功率电池组系统
用于电动汽车或工业设备的大功率电池组系统由很多串联叠置的电池组成。一个典型的电池组含有的电池可能有 96 个之多,就充电至 4.2V 的锂离子电池而言,总共能产生超过 400V 的电压。
尽管系统将电池组看作单个高压电池,对电池组中的电池同时充电或放电,但是电池控制系统必须独立考虑每一个电池的状态。如果电池组中一个电池的容量比其他电池略低,那么经过多个充电/放电周期之后,其充电状态 (SOC) 将逐渐偏离其余的电池。如果这节电池与其余电池的充电状态没有周期性地进行均衡,那么该电池最终将进入深度放电状态,从而损坏,并最终导致电池组故障。因此,必须监视每节电池的电压,以确定充电状态。此外,还必须预先采取措施,使电池能单独充电或放电,以均衡电池之间的充电状态。
与监视系统通信
电池组监视系统需要考虑的一个重要因素是通信接口。就印刷电路板 (PCB) 内部的通信而言,常见的选择包括:串行外围接口 (SPI) 总线;内置集成电路 (I2C) 总线。这两种接口的通信开销都很低,适合于低干扰环境。
另一种选择是CAN总线,该接口在汽车应用中得到了广泛采用。CAN 总线非常可靠,具有差错检测和容错能力,但是通信开销很大,材料成本很高。尽管从电池系统到主 CAN 总线有一个接口也许是可取的,但在电池组内部,SPI 或 I2C 通信是有利的。
诸如凌力尔特的LTC6802电池组监视器 IC 等器件测量由多达 12 节电池组成的电池组的电压,多个 LTC6802可以从电池组的低端到顶端串联叠置,该器件还有内部开关,允许单节电池放电,以使该电池与电池组中其余电池的容量达到均衡状态。
为了说明这种电池组架构,我们考虑一个有 96 节锂离子电池的系统。监视整个电池组需要 8 个电池组 IC,每个器件都以不同的电压工作。
采用 4.2V 锂离子电池,底端监视器件监视 12 个电池,电压从 0V 至 50.4V。下一组电池的电压范围为 50.4V 至 100.8V,沿着电池组向上依此类推。
这些器件以不同电压工作,它们之间的通信带来了巨大挑战。人们已经考虑了各种方法,考虑到系统设计师的侧重点不同,每种方法都有各自的优点和缺点。
电池监视的要求
在确定电池监视系统的架构时,至少需要均衡 5 个主要的要求。这些要求的相对重要性视最终客户的需求和期望的不同而不同。
1. 准确度:为了充分利用最大的电池容量,电池监视器必须是准确的。不过,汽车和工业系统充满噪声,电磁干扰存在于很宽的频率范围内。准确度有任何损失都将给电池组的寿命和性能带来负面影响。
2. 可靠性:无论使用什么样的电源,汽车和工业制造商都必须满足极高的可靠性标准。此外,某些电池的高能量容量和潜在的易变性也是主要的安全隐忧。在保守条件下停机的故障保险系统比较适合灾难性电池故障,尽管这种系统有可能不幸使乘客滞留或使生产线暂停。因此,电池系统必须仔细监视和控制,以确保在系统的整个寿命期内实现全面控制。为了最大限度地减少虚假和真实故障,一个良好设计的电池组系统必须保证可靠的通信、采用可最大限度地减少故障的模式、和具备故障检测。
3. 可制造性:新式汽车中含有种类繁多的电子组件和复杂的布线线束。增加复杂的电子组件和配线以支持电动汽车 / 混合电动汽车 (EV/HEV) 电池系统会给汽车制造带来更多挑战。必须最大限度地减少组件和连线,以满足严格的尺寸和重量限制,并确保大批量生产是实际可行的。
4. 成本:复杂的电子控制系统可能很昂贵。最大限度地减少相对昂贵的组件 (如微控制器、接口控制器、电流隔离器和晶体) 可以显著降低系统的总体成本。
5. 功率:电池监视器本身也是电池的负载。较低的工作电流可提高系统效率,而当汽车或设备关闭时,较低的备用电流可防止电池过度放电。
电池监视
下面介绍了电池监视系统的 4 种架构。每种架构都设计为自主电池监视系统,并假定系统由 96 个电池组成,12 个电池为一组,分成 8 组 (参见表 1)。每组都有一个至主 CAN 总线的 CAN 接口,而且与系统其余部分是电流隔离的。
表 1:电池监视架构比较

并联独立 CAN 模块 (图 1)
每个由 12 个电池组成的模块都含有一个 PC 板,板上有一个 LTC6802、一个微控制器、一个 CAN 接口和一个电流隔离变压器。系统所需的大量电池监视数据使主 CAN 总线难以应付,因此 CAN 模块必须在 CAN 子网上。CAN 子网由一个主控制器协调,该主控制器也为主 CAN 总线提供网关。
图 1:并联独立 CAN 模块
每个由 12 节电池组成的模块都含有一个 PC 板,板上有一个LTC6802和一个数字隔离器。这些模块具有至控制器电路板的独立接口连接,该控制器电路板上含有一个微控制器、一个 CAN 接口和一个电流隔离变压器。微控制器协调这些模块,并为主 CAN 总线提供网关。
图 2:具 CAN 网关的并联模块的方框图
具 CAN 网关的单个监视模块 (图 3)
在这种配置中,由 12 节电池组成的模块中没有监视和控制电路。取而代之的是,单个 PC 板含有 8 个 LTC6802 监视器 IC,每个监视器 IC 都连接至其电池模块。LTC6802 器件通过非隔离式 SPI 兼容的串行接口通信。单个微控制器通过 SPI 兼容的串行接口控制整组电池监视器,该微控制器也是至主 CAN 总线的网关。CAN 收发器和电流隔离变压器是该电池监视系统的最后两个组件。
图 3:具 CAN 网关的单个监视模块的方框图
电池监视架构选择
第一种和第二种架构一般而言比较具有挑战性,因为并行接口需要大量连接和外部隔离。为了应对这种复杂性的提高,设计师采用了独立地与每个监视器器件通信的方法。第三种 (具 CAN 网关的单个监视模块) 和第四种 (具 CAN 网关的串联模块) 架构采用了简化的方法,所受限制最少。