摘要:针对固定式太阳能利用装置的光能利用率低,设计一种太阳追踪系统。此系统由单片机智能控制,采用光电传感器检测太阳照射下遮光器的阴影,从而精确定位太阳与太阳能利用装置相对位置,实现太阳能利用装置的全程太阳追踪,使太阳光能最大限度地得到利用。
随着经济发展和社会进步,自然资源被大量地、甚至是掠夺性地开发和利用,人类的自然资源即将枯竭,因此,寻找新能源已迫在眉睫。而太阳能作为一种干净环保并且取之不尽的可再生新能源在人类生产生活中具有广泛作用。于是,合理开发利用太阳能,提高太阳能利用率有着极其重要的意义。目前,太阳能利用装置的放置位置大多是固定不变的,而一天当中太阳与太阳能利用装置的相对位置是时刻变化的,这也就无法保证太阳能利用装置时刻受到阳光直射,从而使太阳光能的利用率大大降低。为了提高太阳能的利用率,设计一种太阳追踪系统,使太阳能利用装置时刻接受阳光直射,最大限度的利用太阳光能。
1 总体方案的设计
太阳追踪系统由控制模块、检测模块、执行模块3部分组成。其中,控制模块主要包括STC89C52单片机组成的中央处理器;检测模块主要由遮光器配合下的光电传感器、位置传感器及其外围电路构成;执行模块主要包括步进电机、驱动电路。其总体结构如图1所示,其样机如图2所示。

阳光照射下的物体会产生阴影,阴影的方向与太阳光线的方向一致。根据这一原理,本系统采用光电传感器检测太阳照射下遮光器的阴影,精确定位太阳与太阳能利用装置相对位置。
太阳在一天中的运动轨迹可以分解为水平方向和俯仰方向。如图3所示,在水平方向上,当太阳光线直射太阳能利用装置时,水平遮光器3的阴影完全遮住水平光电传感器4;在俯仰方向上,当太阳光线直射太阳能利用装置时,俯仰遮光器5的阴影完全遮住俯仰光电传感器6。当两个光电传感器同时完全处在阴影下时,太阳能利用装置处在阳光直射状态下。
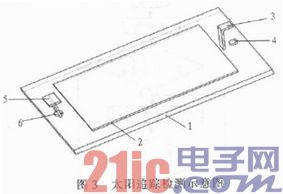
如图3所示,当水平遮光器3的阴影没有完全遮住水平光电传感器4时,说明太阳能利用装置2在水平方向上没有达到太阳直射,控制模块接收到此时水平光电传感器4传递的信号后会控制执行模块水平方向上的电机转动,直到水平遮光器3的阴影完全遮住水平光电传感器4,水平方向上的电机才停止转动,使太阳能利用装置在水平方向上达到太阳直射;当俯仰遮光器5的阴影没有完全遮住俯仰光电传感器6时,说明太阳能利用装置2在俯仰方向上没有达到太阳直射,控制模块接收到此时俯仰光电传感器6传递的信号后会控制执行模块俯仰方向上的电机转动,直到俯仰遮光器5的阴影完全遮住俯仰光电传感器6,俯仰方向上的电机才停止转动,使太阳能利用装置在俯仰方向上达到太阳直射;当水平遮光器3的阴影完全遮住水平光电传感器4、俯仰遮光器5的阴影完全遮住俯仰光电传感器6时,太阳能利用装置此时达到太阳直射。
阴天时太阳光线暗,但是遮光器在太阳照射下产生的阴影与太阳光线之间仍然存在着明显对比,故本系统可以继续精确定位太阳位置,从而使太阳追踪系统不受天气变化的影响;当太阳光线暗到不适合太阳能利用装置工作时,检测光照强度的光电传感器将信号传递给控制模块,控制模块会使太阳追踪系统停止工作,降低太阳追踪系统的能源损耗。
水平方向上太阳追踪系统的运动轨迹:从早晨到晚上,太阳的运动轨迹是自东向西,执行模块的初始设定轨迹也是自东向西,初始设定位置是朝向东方的。晚上,执行模块是朝向西方的,第二天早晨,朝向西方的执行模块会继续自东向西转动一定角度触动水平位置传感器,控制模块接受到水平位置传感器的信号后会使执行模块在水平方向上复位,从而使执行模块一直追踪太阳自东向西转动。俯仰方向上太阳追踪系统的运动轨迹:从早晨到中午,太阳的运动轨迹是自低到高,从中午到晚上,太阳的运动轨迹是自高到低。从早晨到中午,执行模块跟随太阳自低到高转动;从中午到晚上,执行模块首先会继续自低到高转动一定角度触动第一俯仰位置传感器,控制模块接受到第一俯仰位置传感器的信号后会使执行模块跟随太阳自高到低运动;第二天早晨,执行模块首先会继续自高到低转动一定角度触动第二俯仰位置传感器,控制模块接受到第二俯仰位置传感器的信号后会使执行模块跟随太阳自低到高运动。
2 太阳追踪系统的硬件设计
2.1 执行模块设计
为了使执行模块带动太阳能利用装置全程追踪太阳,执行模块必须能够在水平和俯仰两个方向转动,以满足太阳水平方向:东-西,俯仰方向:低-高-低的运动特点。因此,执行模块装有两个步进电机,通过两个步进电机的配合转动实现执行模块在水平跟俯仰方向上的运动,从而实现全程追踪太阳。
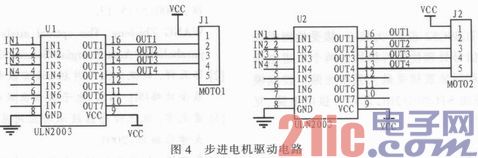
两步进电机由两个ULN2003芯片驱动,两驱动芯片与控制模块中单片机的P0口相连接。其中,P0.0—P0.3控制水平方向上的步进电机,P0.4-P0.8控制俯仰方向上的步进电机,在单片机的控制信号下实现转动或停止。两步进电机的驱动电路如图4所示。
2.2 检测模块设计
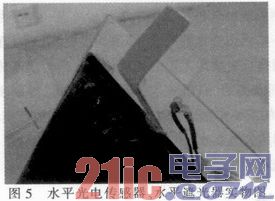
水平光电传感器及其相配合的水平遮光器结构实物如图5所示。用水平光电传感器检测水平遮光器产生的阴影来确定太阳能利用装置与太阳的水平相对位置。
俯仰光电传感器及其相配合的俯仰遮光器结构实物如图6所示。用俯仰光电传感器检测俯仰遮光器产生的阴影来确定太阳能利用装置与太阳的俯仰相对位置。
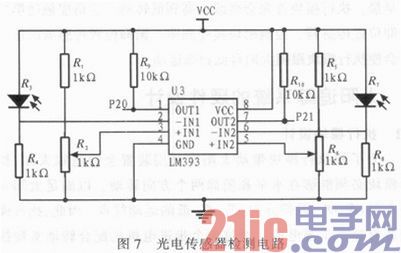
遮光器配合下光电传感器检测电路主要由光电传感器、电阻、电位器以及LM393芯片组成。当光电传感器接受的光照强度大于设定值时,LM393芯片-IN管脚电位低于+IN管脚电位,此时,LM393芯片OUT管脚输出高电平;当光电传感器接受的光照强度小于设定值时,LM393芯片-IN管脚电位高于+IN管脚电位,此时,LM393芯片OUT管脚输出低电平。LM393芯片-INT管脚和+IN管脚分别与单片机的P2.0和P2.1口相连。两光电传感器的检测电路如图7所示。
根据太阳的运动轨迹,执行模块在水平方向上的转动角度为180度,执行模块水平方向上装有两个位置传感器,用来限定执行模块的水平运动范围;执行模块在俯仰方向上的转动角度为90度,执行模块俯仰方向上也装有两个限位传感器,用来限定执行模块的的俯仰运动范围。
2.3 控制模块设计
控制模块以一片STC89C52芯片为核心,接受检测模块传递的信号后,通过对信号处理使执行模块的两个步进电机动作,从而保证太阳能利用装置接受最大强度光照。控制模块中应用的单片机系统由STC89C52RC芯片、供电电路、复位电路、晶振电路四部分组成。
3 系统软件的设计
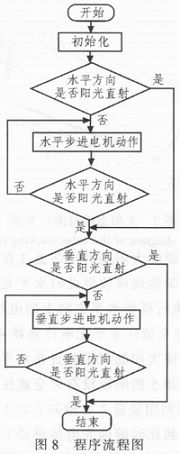
该控制系统的软件主要由一个主程序及一些子程序组成。主程序由一些状态选择语句、循环语句组成,主要是在系统复位后重新检测执行模块与太阳的相对位置。当传感器传回相应的光照、位置等信息后,STC89C52响应相应信号,控制步进电机转动。子程序的主要作用是通过电机正反转控制执行模块的动作,使太阳能利用装置在水平与俯仰方向上组合运动。
程序流程图如图8所示。
4 结束语
太阳追踪系统创新之处在于仿照向日葵,遵循太阳运动规律,采用采用光电传感器检测太阳照射下遮光器的阴影精确定位太阳与太阳能利用装置相对位置,通过单片机智能控制,实现太阳能利用装置的全程太阳追踪。本系统的主要功能是提高太阳光能的利用率,以缓解当前能源紧张的现状。将其应用在太阳能发电站、太阳能路灯、太阳能热水器、太阳灶以及所有固定式太阳能电池板等处,能够大大提高这些装置的利用率。随着人们节能环保意识的不断提高,它将被应用到更广泛的场合。































