引言
随着半导体技术和大功率集成电路制造技术的发展,DCDC变换技术有效克服了开关频率低、效率低、体积大的缺点,从而得到广泛的应用[12]。然而常规的DCDC变换器使用模拟控制器,控制电路复杂,一旦确定输出电压,参数更改十分困难,使得DCDC变换器需要针对不同供电电压的设备设计不同的参数,通用性差;同时,模拟控制电路受外界环境干扰大,控制信号精度较差,使输出电压的品质受到影响[3]。本文对开关电源拓扑进行比较后,提出一种基于DSP控制的BuckBoost拓扑的DCDC变换器。控制器可以通过改变开关频率和占空比快速得到用户需要的电压。通过实时测量电压输出值实现系统的输出反馈,使得控制器能够根据输入电压的变化实时调整开关的相关控制参数,从而稳定输出电压。通过对不同供电要求的负载进行实验,证明该DCDC变换器具有调整简便、输出电压稳定、纹波率小、适用范围广的优点。
1 基于BuckBoost拓扑的开关电源
1.1 开关电源拓扑比较
目前常用的开关电源拓扑有Buck、Boost、BuckBoost三种[45]。
设开关导通时电感两端电压Von,开关断开时电感两端电压为Voff,输入电压为Vin,输出电压为Vout,开关导通时间为Ton,开关截止时间为Toff。当电感处于平衡状态,即开关电源稳定输出时,可以得到

由上式可得开关的占空比D为
在Buck拓扑中
在Boost拓扑中
在BuckBoost拓扑中
在开关信号中,占空比D的区间为[0,1),所以从三种拓扑的占空比方程可以看出,Buck拓扑只能用于降压型的DCDC变换器,Boost拓扑只能用于升压型的DCDC变换电路,而BuckBoost拓扑则可以同时实现对输入电压的升压和降压。
图1 PWM控制信号传输电路
BuckBoost拓扑只需要对开关的占空比进行调整就能够实现对输入电压的升压和降压调整,而对于开关信号的占空比调整,DSP具有很高的调整精度和响应速度,所以在数字控制的DCDC变换器中,使用BuckBoost拓扑较为简单和方便。
1.2 BuckBoost拓扑参数
在DCDC变换器电路应用中,输出电压Vout,最大输出电流Iout和纹波率r需要严格确定。其中输出电压Vout由该拓扑占空比方程可得
输出电流为
其中IL为电感所流过的电流。
电源的纹波率r为
其中IPK为电流的峰峰值,化简得
则可以求得控制器需要的频率为
由以上推导可知DCDC控制电路能够控制开关频率及占空比与电源关键参数输出电压、输出电流和纹波率的关系。由此就可以在数字信号处理器中构建控制信号和反馈信号的关系。
2 BuckBoost控制电路
2.1 开关电源拓扑比较
数字控制DCDC变换电路采用TMS320F2812控制,其工作频率最高能够达到150 MHz,且具有内置的PWM信号输出模块,能够通过对寄存器的控制快速地确定PWM信号的频率和占空比。 该芯片内用于控制占空比的寄存器是16位的,所以能够将控制信号的占空比控制到很精确的数值。
TMS320F2812输出控制信号后,需要对信号进行调理。由于数字控制系统使用CMOS电平,而变换器电路中的电压是不断变化的值,控制电路和DCDC变换电路之间很容易产生相互干扰,这就需要电路做到传输PWM信号的同时隔离电路中的相互干扰。光电耦合器PIC412通过光信号代替电信号的传输,可以实现信号的电气隔离。由于控制信号的电平与变换器中功率开关导通所需要的电压差值较大,同时数字控制电路的驱动能力不足以驱动电源开关,所以信号传输过程中还要对信号的功率进行拉升。PWM信号传输电路如图1所示。
具有特定频率和占空比的PWM信号经过光电耦合器的传输后,实现了电气隔离。通过使用IR2117对信号进行拉升后,PWM信号达到了能够驱动开关的功率,且仍能保证占空比和频率与控制器输出的一致性。
2.2 电源反馈控制模块
由于输入电源电压值有波动,同时变换器中电感、功率开关及续流二极管并不具有理想的电特性,某些性能会随外界环境的变化而发生变化。所以当控制器按照理想的参数计算并输出PWM信号后,得到的输出电压往往不是理论值。这就需要对输出电压进行反馈,使得控制器能够根据输出电压值随时调整参数,已达到要求的输出值。
将过载负载与地之间串联入一个电阻值极小的精密电阻r0,通过测量在电阻上的压降,实现对流过负载电流的测量,再通过换算得出输出电压,进而反馈给控制器相应的参数。DSP通过对A/D转换电路的控制实现对电压值的采集,从而获得输出值的反馈参数。A/D采集及控制电路如图2所示。
2.3 控制器控制程序
作为控制器的DSP向电源开关输入PWM信号,其影响输出电压特性的参数主要是占空比和频率。电源输出电压的关键参数(输出电压、输出电流和纹波率)与控制参数(占空比、输出频率)的关系如式(7)、(8)和(11)所示。控制器可根据上述公式确定理论的输出信号参数。
图2 A/D采集及控制电路
通过A/D电路采集的输出电压反馈到控制器后,控制器通过相应的变化对输出的控制信号进行调整。加入反馈后的控制流程如图3所示。
图3 控制程序流程图
在硬件控制程序中,PWM输出信号主要由GP定时器进行控制。使用GP定时器产生PWM输出需要采用连续递增或连续增/减计数模式,可产生不对称或对称的PWM波形。确定输出控制模式后,可以通过对TxCON寄存器的设置,实现PWM波形的触发方式。通过设置TxPR寄存器的计数值实现对系统时钟的分频,进而实现设置PWM波形的频率。通过设置TxCMPR寄存器的计数值实现PWM波形的触发点,进而实现对输出控制信号占空比的设置。
3 实验验证
本文设计了一种输出电压稳定精确、纹波率小、反馈快速准确的DCDC变换器。实验过程中,对于恒定负载阻抗,能够输出稳定的电压;对于变化的负载阻抗,控制器能够在负载阻抗变换后快速改变控制参数,达到要求的输出电压。
3.1 功率和效率测试
通过改变负载阻抗的大小测试系统的承载能力,并计算输出的最大功率及电源效率。测试数据如表1所列。
表1 不同负载的测试数据
变换器的输出功率可达到30 W,变换效率为80%,且效率随负载增大而增大。因为负载较小时,电路中的电流较大,进而二极管和开关管功耗会增大,且电流增大易使电感磁饱和,损耗会增大。
输出电压27.8 V,负载阻抗30 Ω时,PWM波形正常,输出电压稳定,系统工作正常,如图4、图5所示。
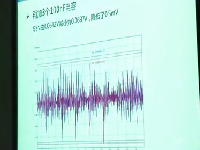
变换器输出纹波电压如图6所示。
从图中可以看出,变换器的波纹电压均值为35 mV。
3.2 输出电压可调测试
DCDC变换器根据输入电压变化情况实时调整控制参数,快速改变输出电压,实现稳定的电压输出。测试结果如图7和图8所示。
图4 负载30 Ω时的输出图5输出的PWM波形图
图6 输出电压纹波
结语
数字控制的DCDC变换器是使用数字控制器(DSP)将传统的模拟控制器进行替换的开关电源。该变换器保留了BuckBoost拓扑的优点,并且引入了带有反馈的数字控制系统。数字控制系统对于控制参数的确定不仅方法简单,输出值精确,而且是一种不依靠经验的设计方法,为DCDC变换电路的快速实现提供了一种工程方面的参考。
图7 输出28 V图8输出31 V