目前,网络技术是汽车电子领域发展的一项新技术。它不仅是解决汽车电子化中的线路复杂和线束增加问题的技术,而且其通讯和资源共享能力成为新的电子与计算机技术在车上应用的一个基础,是车上信息与控制系统的支撑。
汽车电子网络按功能可分为面向控制的网络(CON)和面向信息传输的网络(ION)。按网络信息传输速度,美国汽车工程师协会(SAE)将网络分为A, B,C三类。A类为低速网,波特率在9600bps以下,进而波特率在125kbps以下为中速网B类,125kbps以上为高速网C类。车轮速度(即车轮绕轮轴旋转的线速度)传感器(简称轮速传感器)信号,可供发动机控制模块、防抱制动系统(ABS)控制模块及仪表控制模块共享,使车辆在制动过程中,防抱制动控制模块和发动机控制模块联合控制,达到最佳制动效能。发达国家虽已普遍使用ABS系统,但对轮速信号处理的方法以硬件和软件的形式作为ABS系统的电子控制器(ECU)的一部分而制成专用电路和芯片加以保护。国内对轮速信号的处理大多存在轮速识别的门槛值过高(车速即车体的速度低于10km/h时就无法正确测量车轮速度)的问题。
笔者利用研制的转鼓轮速传感器试验台进行试验,针对轮速传感器产生的信号特点,设计了基于CAN总线的汽车轮速传感器信号处理电路,并用单片机对此信号采集、量化。结果显示:设计出的轮速传感器系统具有轮速测量门槛低(车速达3km/h)、工作可靠、抗干扰能力强等优点,同时,可作为CAN总线局域网的测点,实现传感器信号的数字化、网络化的变送。
轮速传感器
由于磁电式传感器工作稳定可靠,几乎不受温度、灰尘等环境因素的影响,所以,目前在汽车中使用的轮速传感器广泛采用变磁阻式电磁传感器。变磁阻式轮速传感器由定子和转子组成。定子包括感应线圈和磁头(为永久磁铁构成的磁级)两部分。转子可以是齿圈或齿轮两种形式。齿轮形式的转子如图1(a)所示。磁头固定在磁极支架上,支架固定在长轴上,齿圈通过轮毂、制动毂连为一体,长轴穿过车轮与内部的轴承配合,如图1(b)所示。
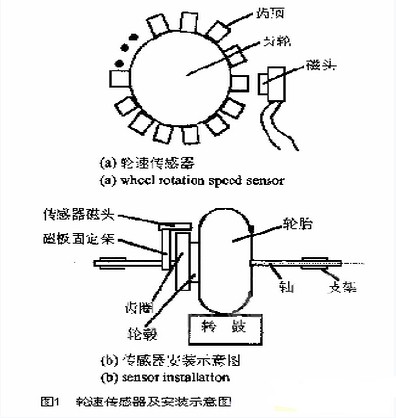
转子的转速与车轮的角速度成正比。转鼓带动车轮转动,传感器转子的齿顶、齿间的间隙交替地与磁极接近、离开,使定子感应线圈中的磁场周期性的变化,在线圈中感应出交流正弦波信号。控制试验台使车轮运转在各种工况,对传感器输出信号进行测量。实验结果表明了变磁阻式轮速传感器产生的信号具有如下特征:
(1)传感器产生的信号为接近零均值的正弦波信号;
(2)正弦波信号的幅值受气隙间隔(磁头与齿圈间的气隙,一般在1.0mm左右为最理想)和车轮转速的影响。气隙间隔越小,车轮速度越高,正弦波信号的幅值越大;
(3)正弦波信号的频率受齿圈的齿数和车轮转速的影响,为每秒钟经过磁头线圈的齿数,即等于齿圈齿数乘以每秒钟的轮速。变磁阻式轮速传感器所产生的信号如图2所示。
试验模拟的是BJ212车型的前轮,用转鼓转速模拟车速。当控制转鼓转速为3km/h时,88齿的传感器产生正弦波信号的幅值约为1V,其频率为 31Hz;当控制转鼓转速为100km/h时,传感器产生的正弦波信号的幅值约为7V,其频率为1037Hz。由于齿轮加工产生的毛刺和其它环境因素的影响,实际信号为在上述信号中叠加了一定频率成分干扰信号,见图2(b)。

轮速信号的检测
将轮速传感器输出的每个正弦波信号调理整形产生一个方波信号,后续电路对方波信号的处理可有以下几种方法:(1)直接送单片机的 T0记数,用T1作定时器。在每个T1定时时间内读出T0的记数值,经计算得到轮速;(2)将方波信号先进行F/V转换,再由单片机A/D转换而得到轮速;(3)方波信号送单片机的外部中断/INT0引脚,将其设定为边沿触发方式,用T1作定时器对方波信号进行周期测量,经计算得到轮速。第一种方法在低速时所测得的轮速误差较大。假定轮速不变,每个T1定时时间读一次T0的记数值,在T1i和T1i+1时间内读得数值由于读数时磁头与齿顶的位置关系有时会相差1,轮速较低时, T1定时时间内T0的记数值较小,因而相对误差较大,导致轮速识别的门槛值过高。第二种方法可提高低速时的测量准确度,但增加了硬件F/V和A/D转换芯片的开支。第三种方法可以在不增加硬件开支的前提下,有效地提高低速时的测量准确度。
轮速传感器系统硬件
轮速传感器系统的硬件以80C31单片微机为核心(外部扩展8kRAM和8kEPROM)。外围电路有信号处理电路、总线控制及总线接口等电路。其结构框图如图3所示。
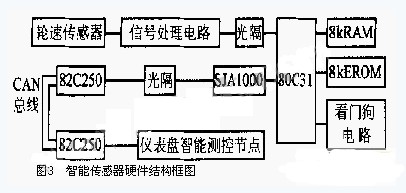
轮速传感器产生信号经滤波、整形、光电隔离后,送80C31的/INT0输入引脚。T1作定时器使用,对脉冲信号进行周期测量。 SJA1000, 82C250组成与CAN总线的控制和接口电路。在轮速传感器的设计过程中,充分考虑其抗干扰和稳定性,单片机的输入/输出端均采用光电隔离,用看门狗定时器(MAX813)进行超时复位,确保系统可靠工作。
信号处理电路
根据轮速传感器信号特性,处理电路由限幅电路、滤波电路和比较整形电路组成,如图4所示。
限幅电路将轮速传感器输出信号Vi正半周的幅值限制在5V以下,负半周使其输出为-0.6V。滤波电路设计成带反馈的有源低通滤波器,其截止频率为 2075Hz(按最高车速为200km/h设计,传感器输出信号对应的频率),选Q=0.707。比较整形电路中设置一定的比较电压,与滤波器输出信号相比较输出方波信号。LM311N输出方波的幅值为10V,经R5,R6分压后得幅值为5V的方波信号送光电隔离器。
总线通信电路
总线接口电路包括传感器与CAN总线接口和仪表板节点与CAN总线接口。通过总线接口电路实现传感器和节点间的数据、控制指令和状态信息的传送。使用总线接口容易形成总线式网络的车辆局域网拓扑结构。具有结构简单、成本低、可靠性较高等特点。
传感器与CAN总线的接口以CAN控制器SJA1000为核心,通过82C250实现传感器与物理总线的接口。CAN总线物理层和数据连路层的所有功能由通信控制器SJA1000来完成。它具有BasicCAN(82C200兼容模式)和PeliCAN(扩展特性)2种工作模式,采用多主结构,具有与各种类型的微处理器相连地接口。
SJA1000的引脚功能和电器特性与82C200完全兼容,较82C200具有更强的错误诊断和处理功能。它具有编程时钟输出,可编程的传输速率(最高达1Mbps),可编程的输出驱动器组态,可组态的总线接口,用识别码信息定义总线访问优先权。控制器使用方便、价格便宜、工作环境温度范围(- 40~125℃),特别适合于汽车及工业环境使用。
82C250作为CAN总线控制器和物理总线间的接口,是为汽车高速传输信息(最高为1Mbps)设计的。它提供对CAN控制器的差动接收功能和对总线的差动发送能力,完全与ISO11898标准兼容。在运动环境中,具有抗瞬变、抗射频和抗电磁干扰性能,内部的限流电路具有电路短路时对传送输出级进行保护的功能。芯片的特色是通过对Rs(8号)引脚输入电平的设计,可工作于3种工作方式:(1)高速方式(Vrs《0.3Vcc);(2)斜率方式 (0.4Vccrs《0.6Vcc);(3)待机方式(Vrs》0.75Vcc)。芯片以高速方式工作时,发送输出晶体管尽可能快的简单地开和关,不测量限制上升和下降的斜率,要用屏蔽电缆来避免射频干扰。当芯片以斜率方式工作时,总线可用非屏蔽的双绞线或并行线。对上升和下降的斜率的限制,取决于Rs引脚到地的连接电阻值,并与Rs引脚的电流成正比。
SJA1000,82C250的信号电平与TTL兼容,可直接接口。但为提高可靠性和抗干扰性能,在智能传感器的设计中,它们之间用光电隔离。 SJA1000的RD,WR,ALE,INT分别与80C31的RD,WR,ALE,INT0引脚相连。80C31的P0.0~P0.7与SJA1000 的AD0~AD7接口,80C31和SJA1000用统一的5V电源供电。给SJA1000的RX1脚提供约0.5Vcc的维持电位。82C250的 CANH,CANL间并接120Ω匹配电阻后接至物理总线,Rs引脚接地,选择高速方式。传输介质采用屏蔽线,以提高总线接口的抗干扰能力。
试验结果
先作信号处理电路试验。用XD5-1信号发生器产生的正弦波模拟传感器信号输入电路,用双踪示波器观察输入输出波形。输入信号在峰值0.6V以上时,电路输出方波、无信号丢失。频率从20~2075Hz,同样,试验也无信号丢失。信号小于0.6V时,无方波输出,即低于0.6V的噪声进不了微机系统。可通过调节电路中R2,R3的阻值改变最小信号的门槛值。在转鼓传感器试验台上对传感器信号作试验。试验结果如表1所示。

BJ212车型前轮的半径是0.375m,磁感应式传感器的齿圈为88齿。表中测速系统显示值与车速表读数值之差是因为车速表误差之故。车速从 3~200km/h,对应的频率从31~2075Hz,设计的测速系统完全覆盖了此车速范围。用非接触式红外测速表检验时,误差在0.3%之内,证明了传感器及信号处理电路的合理性。与仪表盘节点的信息传输试验:传感器测速系统与仪表盘节点的接收和发送信号一致;发送和接收到的信号的数据格式与设定的11 位数据格式一致。
结 论
基于CAN总线的轮速传感器充分发挥了磁感应式传感器的潜能,具有车速识别的门槛值低(3km/h)、测量准确度高、实用性和抗干扰性强、工作可靠等优点,适合在汽车运动环境中使用,且易于与其它测控节点组成网络,实现传感器数据的网络化传输。






















