从51开始,单片机玩了很长时间了,有51,PIC,AVR等等,早就想跟潮流玩玩ARM,但一直没有开始,原因-----不知道玩了ARM可以做什么(对我自己而言)。如果为学习而学习,肯定学不好。然后cortex-m3出来了,据说,这东西可以替代单片机,于是马上开始关注。也在第一时间开始学习,可惜一开始就有点站错了队,选错了型(仍是对我自己而言)。我希望这种芯片应该是满大街都是,随便哪里都可以买得到,但我选的第一种显然做不到。为此,大概浪费了一年多时间吧,现在,回到对我来说是正确的道路上来啦,边学边写点东西。

这里写的是我的学习的过程,显然,很多时候会是不全面的,不系统的,感悟式的,甚至有时会是错误的,有些做法会是不专业的。那么,为什么我还要写呢?这是一个有趣的问题,它甚至涉及到博客为什么要存在的问题。显然,博客里面的写的东西,其正确性、权威性大多没法和书比,可为什么博客会存在呢?理由很多,我非专家,只说我的感慨。
我们读武侠小说,总会有一些创出独门功夫的宗师,功夫极高,然后他的弟子则基本上无法超越他。我在想,这位宗师在创造他自己的独门功夫时,必然会有很多的次的曲折、弯路、甚至失败,会浪费他的很多时间,而他教给弟子时,则已去掉了这些曲折和弯路,当然更不会把失败教给弟子,按理说,效率应该更高,可是没用,弟子大都不如师。为什么呢?也许知识本身并不是最重要的,获取知识的过程才是最重要的?也许所谓的知识,并不仅仅是一条条的结论,而是附带着很多说不清道不明的东西?如植物的根,一条主根上必带有大量的小小的触须?
闲话多了些,就权当前言了。下面准备开始。
一、条件的准备
我的习惯,第一步是先搭建一个学习的平台。原来学51,PIC,AVR时,都是想方设法自己做些工具,实验板之类,现在人懒了,直接购买成品了。
硬件电路板:火牛板
软件:有keil和iar可供选择。网上的口水仗不少,我选keil,理由很简单,这个我熟。目前要学的知识中,软、硬件我都不熟,所以找一个我有点熟的东西就很重要。在我相当熟练之前,肯定不会用到IAR,如果真的有一天不得不用IAR,相信学起来也很容易,因为这个时候硬件部分我肯定很熟了,再加上有 keil的基础,所以应该很容易学会了。
调试工具:JLINK V8。这个不多说了,价格便宜又好用,就是它了。
二、热身
细细端详,做工精良,尤其那上面的3.2吋屏,越看越喜欢。接下来就是一阵折腾了,装JLINK软件,给板子通电,先试试JLINK能不能与电脑和板子通信上了。真顺,一点问题也没有。于是准备将附带的程序一个一个地写进去试一试。一检查,大部分例子的HEX文件并没有给出,这要下一步自己生成,但是几个大工程的例子都有HEX文件,如MP3,如UCCGI测试等,写完以后观察程序运行的效果。因为之前也做过彩屏的东西,知道那玩艺代码量很大,要流畅地显示并不容,当时是用AVR做的,在1.8吋屏上显示一幅画要有一段时间。现在看起来,用STM32做的驱动显示出来的画面还是很快的,不过这里显示的大部分是自画图,并没有完整地显示一整幅的照片,所以到底快到什么程度还不好说,看来不久以后这可以作为一个学习点的。

一个晚上过去了,下一篇就是要开始keil软件的学习了。
三、开始编程
硬件调通后,就要开始编程了。
编程的方法有两种,一种是用st提供的库,另一种是从最底层开始编程,网上关于使用哪种方法编程的讨论很多,据说用库的效率要低一些。但是用库编程非常方便,所以我还是从库开始啦。库是ST提供的,怎么说也不会差到哪里,再说了,用32位ARM的话,开发的观念也要随之改变一点了。
说说我怎么学的吧。
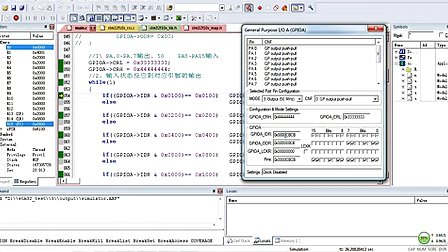
找个例子,如GPIO,可以看到其结构如下:
SOURCE(文件夹)
- APP(文件夹)
-CMSIS(文件夹)
-STM32F10x_StdPeriph_Driver(文件夹)
Lis(文件夹)
OBJ(文件夹)
其中SOURCE中保存的是应用程序,其中又有好多子文件夹,而CMSIS文件夹中和STM32F10x_StdPeriph_Driver文件夹中是ST提供的库,这样,如果要做新的工程只要将这个文件夹整个复制过来就行,其中APP中保存自己的代码。
因为我们用51单片机时一般比较简单,有时就一个文件,所以通常不设置专门的输出文件夹,而这里做开发,通常会有很多个文件加入一个工程中,编译过程中会产生很多中间文件,因此设置专门的文件夹LIS和OBJ用来保存中间文件。
下面就将设置简单描述一下。
将复到过来的GPIO根目录下的所有文件删除,因为我们要学着自己建立工程。
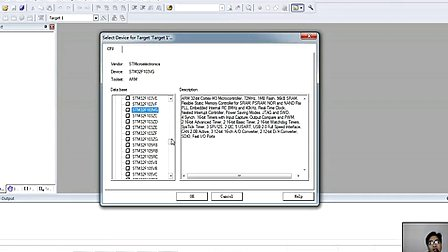
用菜单Project--》New uVision Porject.。.建立新的工程,选择目标器件为STM32103VC,这个过程与建立51单片机的工程没有什么区别,这里就偷点懒,不上图了。接下来看一看怎么设置。
![]()
点那个品字形,打开对话框
这里就给个图了,相信有一定操作基础的人应该会用。顺便提一下,原来用VC或者IAR时总觉得它们的一个功能:就是建立一个是Debug组和Release组,这个功能挺好的,从这个图可在Keil里也是一样可以建的。
将刚才那个文件夹图中CMSIS中的文件加入CMSIS组,一共3个,其中\Source\CMSIS\Core\CM3有两个C语言源程序文件全部加入,另外还有一个在
\Source\CMSIS\Core\CM3\startup\arm文件夹中,这个文件夹中有4个.s文件, 我们选择其中的 startup_stm32f10x_hd.s文件。这是根据项目所用CPU来选择的,我们用的CPU是103VC的,属于高密度的芯片,所以选这个。
至于LIB中的文件,就在这儿:\Source\STM32F10x_StdPeriph_Driver\src啦。这里有很多个文件,把什么文件加进去呢?怕麻烦的话,把所有文件全部加进去,这并不会增加编译后的代码量,但会增加很多的编译时间。
接下来设定目标输出文件夹。上面这个图怎么出来的就不说啦,单击“Select Foler for Objects。”,在弹出来的对话框中选择OBJ文件夹。

同样方法,选择List文件的输出文件夹。
设置好后,如果直接编译是不行的,会出错。还需要提供头文件所在位置。单击c/C++标签页。
第一次进入时Include Paths 文本框中是空白的,点击其后的按钮打开对话框,增加相应的路径
这样路径就设好了。单击OK,回到上一界面,然后再单击OK,退出设置,即可编译、链接。
下一会要试一试新的3.12版的库效果如何了。
升级库
光盘中所带的例子是3.10的,另外还有一个3.12的,我 试着将3.12的库替代原来的库,还真有问题,下面就简述问题及解决方法。
(1)将库文件解压
库文件名是:stm32f10x_stdperiph_lib.zip,解压后放在任意一个文件夹中。
(2)由于原作者做了很好的规划,每一个项目中都分成三个文件夹,并且在source文件夹中又做了3个文件夹,其中APP文件夹是放自己写的文件的,其他的两个是从库中复制过来的,因此,想当然地把3.1.2版本中相同的两个文件夹:
CMSIS和STM32F10x_StdPeriph_Driver直接复制过来,以为一切OK,结果一编译,出来一堆错误。
其中有错误:
Source\App\main.c(7): error: #20: identifier “GPIO_InitTypeDef” is undefined
。..。
还有大量的警告:
Source\STM32F10x_StdPeriph_Driver\src\stm32f10x_flash.c(130): warning: #223-D: function “assert_param” declared implicitly
看了看,在APP文件夹中还有一些不属于自己的东西:
stm32f10x_conf.h,stm32f10x_it.h,stm32f10x_it.c,打开一看,果然是3.10版本的,没说的,换。。。。,找到STM32F10x_StdPeriph_Lib_V3.1.2\Project\Template文件夹,用里面的同样的文件替换掉这几个文件,这回应该万事大吉了吧。
再一看,依然如故,,没办法了,只好细细研究了。通过观察,发现原来可以编译通过的工程,在main.c下面挂满了.h文件,而这个通不过的,则少得很。
这是编译能通过的工程

这是编译通不过的工程
显然,有些文件没有被包含进来。一点一点跟踪,发现大部分的头文件都包含在stm32f10x_conf.h中,而这个文件又出现在stm32f10x.h中,其中有这样的一行:
#ifdef USE_STDPERIPH_DRIVER
#include “stm32f10x_conf.h”
#endif
看来,是这个USE_STDPERIPH_DRIVER没有被定义啊,于是,人为地去掉条件:
//#ifdef USE_STDPERIPH_DRIVER
#include “stm32f10x_conf.h”
//#endif
再次编译,果然就OK了。可是,可是,也不能就这么去掉啊,怎么办呢?万能的网啊,一搜果然就有了。
到设置 C/C++页面
在那个define中加入“USE_STDPERIPH_DRIVER,STM32F10X_HD”
当然,去掉条件编译前面的注释,回到原样。
再次编译,一切顺利。可是,原来的工程例子也没有加这个啊,怎么回事呢?再次打开原来的例子,找到stm32f10x.h,可以看到有这么一行:

而新的stm32f10x.h中则是这样的:

原来那个3.1.0版的stm32f10x.h被人为地修改了一下,所以,不在define中定义也不要紧,而新升级的3.1.2则不行了。
至此,简单的升级搞定。
内存学习
ARM中的RO、RW和ZI DATA
一直以来对于ARM体系中所描述的RO,RW和ZI数据存在似是而非的理解,这段时间对其仔细了解了一番,发现了一些规律,理解了一些以前书本上有的但是不理解的东西,我想应该有不少人也有和我同样的困惑,因此将我的一些关于RO,RW和ZI的理解写出来,希望能对大家有所帮助。
要了解RO,RW和ZI需要首先了解以下知识:
ARM程序的组成
此处所说的“ARM程序”是指在ARM系统中正在执行的程序,而非保存在ROM中的bin映像(image)文件,这一点清注意区别。
一个ARM程序包含3部分:RO,RW和ZI
RO是程序中的指令和常量
RW是程序中的已初始化变量
ZI是程序中的未初始化的变量
由以上3点说明可以理解为:
RO就是readonly,
RW就是read/write,
ZI就是zero
ARM映像文件的组成
所谓ARM映像文件就是指烧录到ROM中的bin文件,也称为image文件。以下用Image文件来称呼它。
Image文件包含了RO和RW数据。
之所以Image文件不包含ZI数据,是因为ZI数据都是0,没必要包含,只要程序运行之前将ZI数据所在的区域一律清零即可。包含进去反而浪费存储空间。
Q:为什么Image中必须包含RO和RW?
A:因为RO中的指令和常量以及RW中初始化过的变量是不能像ZI那样“无中生有”的。
ARM程序的执行过程
从以上两点可以知道,烧录到ROM中的image文件与实际运行时的ARM程序之间并不是完全一样的。因此就有必要了解ARM程序是如何从ROM中的image到达实际运行状态的。
实际上,RO中的指令至少应该有这样的功能:
1. 将RW从ROM中搬到RAM中,因为RW是变量,变量不能存在ROM中。
2. 将ZI所在的RAM区域全部清零,因为ZI区域并不在Image中,所以需要程序根据编译器给出的ZI地址及大小来将相应得RAM区域清零。ZI中也是变量,同理:变量不能存在ROM中
在程序运行的最初阶段,RO中的指令完成了这两项工作后C程序才能正常访问变量。否则只能运行不含变量的代码。
说了上面的可能还是有些迷糊,RO,RW和ZI到底是什么,下面我将给出几个例子,最直观的来说明RO,RW,ZI在C中是什么意思。
1; RO
看下面两段程序,他们之间差了一条语句,这条语句就是声明一个字符常量。因此按照我们之前说的,他们之间应该只会在RO数据中相差一个字节(字符常量为1字节)。
Prog1:
#include 《stdio.h》
void main(void)
{
;
}
Prog2:
#include 《stdio.h》
const char a = 5;
void main(void)
{
;
}
Prog1编译出来后的信息如下:
================================================================================
Code RO Data RW Data ZI Data Debug
948 60 0 96 0 Grand Totals
================================================================================
Total RO Size(Code + RO Data) 1008 ( 0.98kB)
Total RW Size(RW Data + ZI Data) 96 ( 0.09kB)
Total ROM Size(Code + RO Data + RW Data) 1008 ( 0.98kB)
================================================================================
Prog2编译出来后的信息如下:
================================================================================
Code RO Data RW Data ZI Data Debug
948 61 0 96 0 Grand Totals
================================================================================
Total RO Size(Code + RO Data) 1009 ( 0.99kB)
Total RW Size(RW Data + ZI Data) 96 ( 0.09kB)
Total ROM Size(Code + RO Data + RW Data) 1009 ( 0.99kB)
================================================================================
以上两个程序编译出来后的信息可以看出:
Prog1和Prog2的RO包含了Code和RO Data两类数据。他们的唯一区别就是Prog2的RO Data比Prog1多了1个字节。这正和之前的推测一致。
如果增加的是一条指令而不是一个常量,则结果应该是Code数据大小有差别。
2; RW
同样再看两个程序,他们之间只相差一个“已初始化的变量”,按照之前所讲的,已初始化的变量应该是算在RW中的,所以两个程序之间应该是RW大小有区别。
Prog3:
#include 《stdio.h》
void main(void)
{
;
}
Prog4:
#include 《stdio.h》
char a = 5;
void main(void)
{
;
}
Prog3编译出来后的信息如下:
================================================================================
Code RO Data RW Data ZI Data Debug
948 60 0 96 0 Grand Totals
================================================================================
Total RO Size(Code + RO Data) 1008 ( 0.98kB)
Total RW Size(RW Data + ZI Data) 96 ( 0.09kB)
Total ROM Size(Code + RO Data + RW Data) 1008 ( 0.98kB)
================================================================================
Prog4编译出来后的信息如下:
================================================================================
Code RO Data RW Data ZI Data Debug
948 60 1 96 0 Grand Totals
================================================================================
Total RO Size(Code + RO Data) 1008 ( 0.98kB)
Total RW Size(RW Data + ZI Data) 97 ( 0.09kB)
Total ROM Size(Code + RO Data + RW Data) 1009 ( 0.99kB)
================================================================================
可以看出Prog3和Prog4之间确实只有RW Data之间相差了1个字节,这个字节正是被初始化过的一个字符型变量“a”所引起的。
3; ZI
再看两个程序,他们之间的差别是一个未初始化的变量“a”,从之前的了解中,应该可以推测,这两个程序之间应该只有ZI大小有差别。
Prog3:
#include 《stdio.h》
void main(void)
{
;
}
Prog4:
#include 《stdio.h》
char a;
void main(void)
{
;
}
Prog3编译出来后的信息如下:
================================================================================
Code RO Data RW Data ZI Data Debug
948 60 0 96 0 Grand Totals
================================================================================
Total RO Size(Code + RO Data) 1008 ( 0.98kB)
Total RW Size(RW Data + ZI Data) 96 ( 0.09kB)
Total ROM Size(Code + RO Data + RW Data) 1008 ( 0.98kB)
================================================================================
Prog4编译出来后的信息如下:
================================================================================
Code RO Data RW Data ZI Data Debug
948 60 0 97 0 Grand Totals
================================================================================
Total RO Size(Code + RO Data) 1008 ( 0.98kB)
Total RW Size(RW Data + ZI Data) 97 ( 0.09kB)
Total ROM Size(Code + RO Data + RW Data) 1008 ( 0.98kB)
================================================================================
编译的结果完全符合推测,只有ZI数据相差了1个字节。这个字节正是未初始化的一个字符型变量“a”所引起的。
注意:如果一个变量被初始化为0,则该变量的处理方法与未初始化华变量一样放在ZI区域。
即:ARM C程序中,所有的未初始化变量都会被自动初始化为0。
总结:
1; C中的指令以及常量被编译后是RO类型数据。
2; C中的未被初始化或初始化为0的变量编译后是ZI类型数据。
3; C中的已被初始化成非0值的变量编译后市RW类型数据。
附:
程序的编译命令(假定C程序名为tst.c):
armcc -c -o tst.o tst.c
armlink -noremove -elf -nodebug -info totals -info sizes -map -list aa.map -o tst.elf tst.o
编译后的信息就在aa.map文件中。
ROM主要指:NAND Flash,Nor Flash
RAM主要指:PSRAM,SDRAM,SRAM,DDRAM