1.色彩差补(Color Interpolation)基础
当图片在显示器上显示的时候,每一个象素都有R(红)G(绿)B(蓝)三种颜色,如果在图象处理系统中,有三个同样性能的图象传感器,有不同的滤波镜片,分别对应R(红)G(绿)B(蓝)三种颜色,那么色彩差补(Color Interpolation)是根本就不需要的,因为使用这种方式,在图象中的每一个点都分别对应R(红)G(绿)B(蓝)三种颜色。在实际的图象采集系统中,也有一些是使用3个图象传感器的,例如高档的数码摄象机中,就会使用三个图象传感器分别采样R(红)G(绿)B(蓝)三种颜色,然后直接将采样的三种颜色进行合并。但是这种设计太贵,所以一般不采用。一般的数码相机和数码摄象机中,都是使用单独的图象传感器。
在只有一个传感器的图象处理系统中,图象传感器的每一个感光单元都有自己的颜色滤波镜片,每一个单元只能接收一种颜色。在图象传感器输出的RAW数据中,每一个点不是包含R(红)G(绿)B(蓝)三种颜色,而是只包含一种颜色,这样想得到一幅彩色的图片,就必须进行色彩差补。
2.矩形采样的色彩差补
矩形采样的图象传感器中,色彩滤波矩阵的排列方法如图所示。排在最前面的颜色可以有几种选择,但是每一个感光单元的之间的距离无论是横坐标还是纵坐标都是相同的。

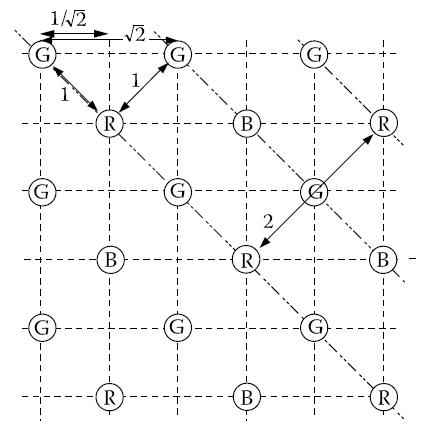
3.梅花形采样的色彩差补
梅花形采样的图象传感器中,色彩滤波矩阵的排列方法如图所示。实际上就相当于矩形采样旋转了45度角。是对矩形采样的一种扩展,目前superCCD中主要采用了这种采样方式,它的优点在于可以使用更少的点,实现更多的插值象素。
4.色彩差补的算法
色彩差补就是用其他点实际测量到的数据来估算没有测量到的点的数据的方法。比如一个绿色的感光单元取其他点的红色和蓝色来组成一个RGB的数据。很明显,取越多的点来做计算,结果就越准确,但是在实际的应用中,由于成本和计算时间的要求,不可能去很多的点,这样就要求有一个比较均衡的算法来做计算。
最简单的算法就是直接使用相邻点的数据信息来进行色彩差补。这其实就是认为像邻的两个象素的数值应该是一样的。这种方法不需要进行任何的计算,但是所得到的图象质量实在是不能够使用。
第二简单的方法就是线性法和双线性法。就是中间一个点的数据,再加上相邻的两个点的平均数。双线性法就是在两个方向上分别取数据,所以叫双线性法。计算的顺序对这种方法是没有影响的。线性法的图象质量是要比直接取数据的好很多,但会产生环型图象噪声。要避免这种噪音就需要使用更多的点来做平均值的计算。