1 RTOS的基本概念
实时多任务操作系统(RTOS-Real Time Operating System)是根据操作系统的工作特性而言的。实时是指物理进程的真实时间。实时操作系统是指具有实时性,能支持实时控制系 统工作的操作系统。首要任务是调度一切可利用的资源完成实时控制任务,重要特点是要满足对时间的限制和要求。
实时操作系统中的任务(Task)有四种状态:运行(Executing),就绪(Ready),挂起(Suspended),休眠(Dormant)。
运行:获得CPU控制权。
就绪:进入任务等待队列。通过调度转为运行状态。
挂起:任务发生阻塞,移出任务等待队列,等待系统实时事件的发生而唤醒。从而转为就 绪或运行。
休眠:任务完成或错误等原因被清除的任务。也可以认为是系统中不存在了的任务。
某一时刻,系统中只能有一个任务在运行状态。各任务按级别通过时间片分别获得对CPU的访问权。
RTOS内核按照任务的调度机制可以分为两种:一种是占先式内核,一种是非占先式内核。
占先式内核:当一个低优先级的任务正在运行时,一个高优先级的任务就绪,那么RTOS就会把低优先级的任务挂起,来运行高优先级的任务。等高优先级的任务执行了一个循环挂起之后,再回到低优先级任务的断点继续运行。也就是说,任务的优先级越高,响应起来越及时。
非占先式内核:当一个低优先级的任务在运行时,一个高优先级的任务就绪,RTOS不会把CPU切换给高优先级的任务,必须等低优先级的任务执行了一个循环挂起之后,再由RTOS根据所有就绪任务的优先级判断将CPU切到哪个任务。
绝大多数商业RTOS, 以及著名的开放源码的uC/OS-II操作系统,都采用的是占先式内核,它的优点是实时性要比非占先式内核高。
在RTOS中,一般情况下,每个任务都一无限循环,每循环一次,任务挂起一段时间,以供调度程序把这段时间交给优先级更高的其它就绪任务,让其它任务运行(如图1)。当所有任务都挂起时,RTOS把任务切到空闲任务来执行。
空闲任务是一个系统任务,它一般是一个空的循环,优先级最低,也从来不会挂起。
2 在MSP430上使用RTOS的意义
一般的观点认为,MSP430上使用RTOS是没有意义的。这是可以理解的,因为MSP430的硬件资源有限(以MSP430F149为例,只有2KRAM),任何商业操作系统都不可能移植到MSP430上。目前在MSP430上得到应用的RTOS,只有 uC/OS-II,但使用uC/OS-II 必须有昂贵的C编译器,这严重限制了其在MSP430上的使用。
正是基于以上情况,笔者在应用MSP430过程中,编写了一个基于MSP430F149的RTOS,暂定名为M430/OS。它占用RAM量少、代码短小,稍加改动就可适用于大多数其它MSP430单片机。
在MSP430单片机系统上使用M430/OS,对系统有以下意义:
1) 实现软件设计的模块化。可将不同的功能模块编制成相应的任务,由操作系统按级别调用,不必为先执行哪个功能、后执行哪个功能而费神。
2) 更能合理、有效地利用CPU有限的资源。按任务的重要程度安排任务的级别,能够保证最重要的任务执行得最及时。
3) 大大降低系统故障率。低优先级的任务发生阻塞时,高优先级的的任务的执行不受影响。
3 M430/OS在MSP430F149上的实现
3.1 功能特点
M430/OS有以下特点:
1) 采用占先式内核,即高优先级的任务可以从低优先级任务"抢"回CPU控制权;
2) 每个任务都单独开辟一个任务栈;
3) 每个任务占十几到几百个字节的任务堆栈,任务栈的大小可以根据任务中现场数据、局部变量和嵌套调用的情况估算;
4) 每个任务各占一个优先级,不支持两个任务有相同的优先级;
5) 不支持信号量、邮箱功能;
6) 任务状态只有三种:运行(Executing),就绪(Ready),挂起(Suspended);
7) 系统占用RAM量=((任务个数+1)×4)+6个字节,不包括任务堆栈;
8) 代码量少,目前版本的代码共有87行汇编代码,256字节目标代码;
9) 理论最多支持126个任务;
10)任务锁定功能:在一段低优先级的代码中,不想让操作系统把CPU权切换到别的任务,这时可以把这代码锁定,在运行这段码时,就不会引起任务切换;
11)任务唤醒功能:在一个任务中产生一个的事件来触发其它任务运行(如果被触发的任务优先级高的话,就会马上运行)。
3.2 系统函数介绍
1) OS_Init:多任务初始化,进行任务栈(任务栈的结构见图3)、任务延时计数、任务状态的初始化。初始化完成后,系统直接切换到最高优先级的任务,多任务系统启动。
2) OS_Time_Dly:把当前任务挂起一段指定时间让其它任务运行。
3) OS_Sched:任务调度,它先把每个任务的延时数减1,然后再找出最高优先级的就绪任务,并切换到这个就绪任务。如果无就绪任务,就切换到空闲任务。
4) OS_Free_Task:空闲任务,是一个很重要的系统任务,当所有任务都挂起时,来运行此任务。它主要是对一个计数器Free_Count一直进行累加,用户可以根据这个计数器来计算出CPU的利用率来。
5) OS_Task_Lock:锁定任务调度,禁止任务调度。主要用来锁定在低优先级中的一些为可重入的代码或一些重要代码。
6) OS_Task_Unlock:解锁任务调度,和上面的子程序功能相反。
7) OS_Task_Wakeup:唤醒指定优先级的任务,并产生一次任务调度,如果被唤醒任务的优先级比当前运行的任务的优先级高,就会任务切换到被唤醒的任务中,否则等待下一个调度时机。
3.3 主要功能的实现
a) 任务初始化
系统加电运行后,首先对硬件资源进行初始化,接着就要对多任务进行初始化了。主要是初始化每个任务的任务栈、每个任务的时钟滴数和堆栈指针位置。我们把每个任务栈都初始化成图2形式:
任务栈的初始化如下程序(r11是用来初始任务堆栈的一个指针,r10是一个循环计数器):
mov.w #(栈底 + 2) , r11
clr.w Task_Tick(r10) ;清0时钟滴嗒数
mov.w #任务首地址 , 0(r11) ;把任务地址压入堆栈
mov.w SR , -2(r11) ;把标志寄存器放入任务栈
mov.w r11 , Task_SP(r10)
sub.w #现场所占的字节数 , Task_SP(r10) ;SP位置放入堆栈
初始化完任务栈之后,就把堆栈指针指向最高任务先级任务栈的任务首地址处,再执行ret返回,这样,多任务就启动开了。如下程序:
mov.w #09feh , sp;最高优先级的任务栈任务首地址位置
ret ;返回到最高优先级的任务
任务初始化的流程见图3。
b) 时钟节拍
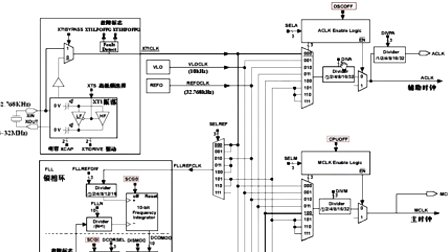
时钟节拍由MSP430F149的TimerA产生,TimerA工作于上升模式,CCR0中是TimerA计数最大值。TimerA初始化代码如下:
bis.w #(TASSEL1+TACLR+MC_1),&TACTL
mov.w 2(sp),&CCR0 ;计数最大值,此值决定时钟节拍
bis.w #CCIE,&CCTL0
c) 任务调度
应用程序调用OS_init进行初始化后,直接切换到最高优先级的任务。
每个任务在运行一个循环后执行OS_Time_Dly挂起。这是通过把该任务的延时数填到该任务的Task_Tick中,然后再执行任务调度程序实现的。
任务调度就是在定时中断时对所有任务的Task_Tick减1,然后再接优先级高低的顺序查找Task_Tick减到0的任务,并直接跳到任务切换程序。
下面的一段是任务切换程序(r10的内容是就绪任务的标志,由调度程序找出):
pushALL ;把当前任务现场入栈
mov.b Now_Task,r11 ;当前任务标志放r11
mov.w sp,Task_SP(r11);保存当前任务堆栈指针
mov.b r10,Now_Task ;就绪任务标志变为当前任务标志
mov.w Task_SP(r10),sp;就绪任务的任务栈指针放入SP
;此时再进行堆栈操作就是对就绪任务的任务栈操作了。
popALL ;把就绪任务的现场出栈
reti ;模拟中断返回,返回到就绪任务
任务调度的调度时机有两种:一种是在任务挂起时,一种是定时中断。任务挂起时的任务调度一定会引起任务切换,定时中断就不一定引起任务切换了。因为如果就绪任务是当前正在运行的任务时不会引起切换。正是如此,任务调度是RTOS中执行得最频繁的一个功能,也是最重要的一个功能,所以必须尽量缩减其代码量,尽量用可靠的调度算法来减少任务调度所占的时间。这个子程序的流程见图4。
d) 任务锁和其它功能的实现
任务的加锁与解锁是为了使一些在低优先级任务的不可重入代码或对实时性要求较高的I/O操作在执行中不产生任务切换,这项功能是通过设置一个标志位实现的,当调度程序检查到任务被锁定时,就算有就绪任务也必须等开锁之后才能切换。
如果系统突然产生一个事件要某个挂起的任务来处理,可以在事件产生的程序中调用任务唤醒。它的原理是把Task_Tick清0,然后执行一次任务调度,如果这个任务优先级较高,就直接切换到这个任务里执行了。
总结
M430/OS已在笔者开发的基于MSP430F149的系统上得到应用,运行稳定可靠。该操作系统稍加改动,就可应用于其它MSP430单片机。当然,它的功能还是很有限的,也可能还存在一些尚未暴露的问题,但无论如何,它向我们证明,在MSP430单片机系统中使用RTOS是完全可能的。