摘要长江航道一年中水位变化频繁,水位发生变化后,指示航标易偏离初始位置,无法准确指示航道位置,影响航行安全。为了提高航标维护人员调整航标位置的工作效率、降低维护成本和工作量,遥测遥控航标系统的推行将势在必行。文中主要介绍了基于GSM无线通信方式的遥测遥控航标系统的设计与应用,该航标已成功应用于部分航道。应用证明,该系统设备工作稳定可靠,实现了无人值守全自动遥测遥控航标功能。
关键词遥测遥控;GSM;航标船
无线遥测作为GSM一项新的业务,具有实时监控、无线远程传输等特点,适用于交通运输、野外施工、工控管理等领域。遥测遥控航标系统就是基于该技术的一项应用,该系统能够通过GSM网络的短信功能,直接对航标船进行遥控测量,及时掌握航标船的各种工作状态,并根据水位信息遥控航标船,调整其在水中的位置。减少航标维护人员定期往返调整航标的频次,节约了航标的养护费用。
1 遥测遥控航标系统组成
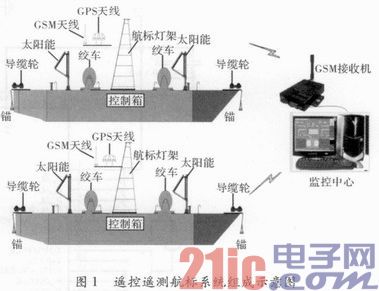
遥控遥测航标系统(以下简称航标)以航标船为载体,由绞车、航标灯、控制箱和太阳能供电系统、监控中心软件等组成。航标可随水位变化,通过监控中心软件按指令控制收放缆绳。绞车由直流恒力矩电机、失电制动器、减速机、绞盘和导缆轮及接近开关组成,通过接口与位于仪器舱的控制系统连接,由控制系统控制收放缆绳并测量缆长;控制系统是整个系统的核心,主要由中心处理单元、电机驱动模块、GSM无线通信单元、GPS定位单元、稳压及电源转换模块组成;太阳能供电模块由太阳能电池板、充放电控制器和胶体电池组成,是整个遥控航标的能量来源,航标指示灯使用太阳能一体化闪灯。
2 控制系统组成及工作原理
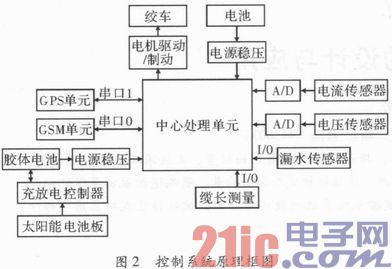
控制系统是系统的核心,由中心处理单元、GSM无线通信单元、电机驱动模块、制动单元、GPS定位单元和传感器单元组成。控制系统原理如图2所示。
遥测遥控航标系统靠太阳能供电模块维持日常通讯及控制工作。当水位变化超出设定门限,监控中心根据当前水位变化计算缆长调整量,并下发缆长调整信息给航标船,航标船GSM无线通讯单元接收信息并通过串口转发给中心处理单元;中心处理单元应答指令并驱动电机调整缆长,调整完毕后,中心处理单元通过GSM无线通讯单元,向监控中心上传调整结束状态信息。指示航标系统定时开启GPS定位单元获得航标船当前的经纬度信息,通过GSM无线通讯单元发送至监控中心,监控中心参考GPS信息确认航标是否调整到预定位置。监控中心将定时发送工况询问指令,指示航标回复电压、电流、定位、故障等信息。
3 控制系统设计
3.1 中心处理单元
遥控航标中心处理单元负责接收指挥中心的控制指令,并执行相应动作。同时可采集GPS位置信息、系统工作电流、电池电压、漏水等数据,一旦发现数据超出规定范围,立即向监控中心发送报警信息。中心处理单元主要由供电单元、单片机处理单元、A/D采集单元、继电器单元、看门狗单元组成。
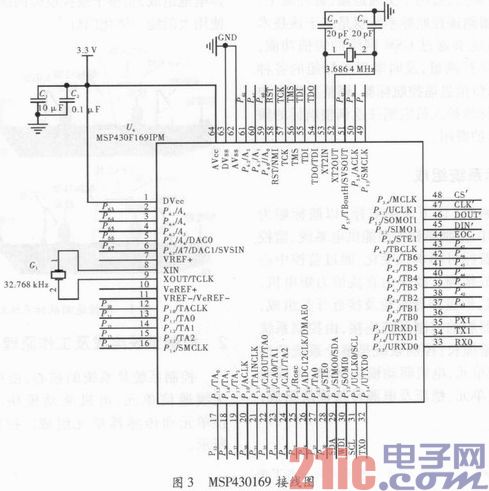
遥控航标的工作功耗是一项关键指标,系统待机功耗越低,免维护时间越长,越能降低维护成本,因此控制系统要求实现低功耗待机。中心处理单元以TI公司生产的MSP430F169单片机为处理核心,其具有超低功耗、强大的处理能力、稳定的工作系统、高性能模拟技术以及丰富的片上处理模块等特点,在高效、节能方面具有明显优势。该单片机具有以下特点:(1)低电压、超低功耗,该单片机的在1.8~3.6 V电压工作,在1 MHz的时钟条件下,耗电电流<400μA,休眠模式下只有几十μA。(2)强大处理能力。(3)系统工作稳定。(4)丰富的片内外设。
该单片机有两个异步串口,工作方便可靠。单片机串口与GSM无线通讯单元和GPS定位单元的TTL串行通信口相连,实现中心处理单元与GSM无线通讯单元和GPS定位单元的通信。
当水位发生变化超过一定范围时,通过收放航标船上的缆绳调整航标位置。收放缆时缆绳经过一导缆轮出水或入水,在导缆轮上嵌入一磁钢,再在导缆轮附近放置一磁感式接近开关。导缆轮每转一圈,磁感式接近开关就检测到磁钢一次,发出一个脉冲给单片机,单片机通过脉冲计数进行缆长监测。
中心处理单元安装有电流电压传感器,用于检测电池电压,一旦电池发生欠压,中心处理单元自动上传至监控中心报警;当系统工作电流超出预定值时,中心处理单元自动上传至监控中心报警。中心处理单元安装有漏水传感器,用于检测控制舱漏水状况,如遇控制舱漏水,中心处理单元会自动向监控中心报警。
3.2 GSM无线通信单元
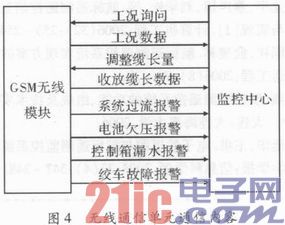
GSM无线通讯单元作为指示航标系统与监控中心的通讯接口,接收监控中心指令并转发给中心处理单元,并将中心处理单元返回的工况信息和检测到的报警信息发给监控中心。通讯内容如图4所示。
无线通信单元采用杭州晶控电子有限公司生产的JB35GB型通讯模块,在遥控航标系统中,主要采用JB35GB通讯模块的“来电号码过滤器”和“串口传送数据和文本”功能。JB35GB通讯模块有RS232串口和TTL串口,其中RS232串口与上位机相连,以实现模块工作时参数的设置,例如:默认接收数据方手机号,发送成功确认信号,接收短信格式设置等等。TTL串口与单片机中心处理单元相连接,按照与监控中心事先约定好的格式,将从监控中心接收来的数据转发给中心处理单元、并接收中心处理单元的数据转发给监控中心。
(1)JB35GB通讯模块的发送。发送数据短信的格式为(16进制HEX格式发送数据):23 3X3X3X3X3X3X3X3X3X3X3X23datal…dataN(等待≥0.1 s表示结束)。其中,XXXXXXXXXXX是需要发送的目的手机号码,号码的开头和末尾都加“23”组成一个号码段,号码段也可以省略,这时datal…dataN就直接发送给“短信数传设置”中的默认接收数据方的手机号码上。
“2323datal…dataN(等待≥0.1 s表示结束)”。datal…dataN是计算机或单片机需要发送的数据部分,N≤140。数据必须以16进制HEX格式发送,如果要发送ASCII码或Unicode码,就先要把ASCII码或Unicode码转换成对应的16进制数再发送。如果想把计算机或单片机的文本数据发送给普通手机显示阅读,则必须把文本数据转换成Unicode码对应的16进制HEX格式发送。计算机或单片机向JB35GB传输数据必须从第一个Byte“#”到最后一个Byte dataN连续传输。当发送完最后一个数据dataN后,在以后的0.1 s里,计算机或单片机就不能再向串口发送任何数据。JB35GB检测到串口≥0.1 s无数据后,则把datal…dataN打包成短信的格式发送出去。
对于连续发送多条短信数据时,必须遵循以下原则:第一条短信数据发送给JB35GB后,串口出现了一个发送成功确认信号“OD”后,就可以发送第二条短信数据。
(2)JB35GB通讯模块的接收。JB35GB在收到短信数据后,将数据还原成和发送时对称的数据格式,同时从TTL串口和RS232串口输出给计算机或单片机。计算机或单片机必须采用串口中断方式接收JB35GB串口传来的数据,以保证短信数据不会丢失。JB35GB把接收到的短信数据向串口输出后,则将此短信立即删除,因此JB35GB内部短信是不会溢出的。
3.3 电机驱动及制动单元
为减少绞车功耗,延长航标免维护时间,在满足扭矩的前提下,绞车电机选用小功率直流电机。由于江面有一定流速,水流对船体的作用力较大,因此绞车内部必须安装失电制动单元,防止水流作用拽动缆索。只有当绞车制动器通电后,绞车才允许转动。因此绞车每次启动分两步执行,首先通过单片机控制固态继电器输出,给制动器上电解除制动,然后单片机控制稳压电源输出给绞车电机供电,开始收放缆索。绞车驱动单元与其他单元接口关系如图5所示。
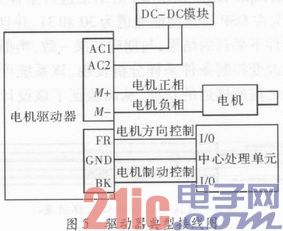
绞车驱动器供电电压上限为48 V;蓄电池的标称电压为48 V;实际太阳能充电时为浮动电压,因此输出电压会大于蓄电池电压,从安全角度考虑,驱动单元输入电压应先经过稳压48 V后再输入。
3.4 软件结构
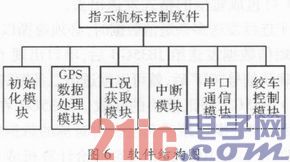
为实现航标控制系统软件的功能,并使所开发的软件具有高度的可靠性和可维护性,采用模块化设计方法和结构设计方法,构成指示航标控制软件总体结构,软件结构如图6所示,各模块功能分别为:初始化模块包含端口、参数的初始化;GPS数据处理模块用于收取、验证、处理GPS数据;工况获取模块用于A/D采集、门限监测、应答;中断模块用于定时中断、串口中断;串口通信模块用于GSM数据、GPS数据、应答信息;绞车控制模块用于绞车收缆、放缆、停止。
监控中心控制软件主要负责监控记录航标测量数据,监测航标报警信息及控制航标调整位置。监控中心共享水位站水位信息,通过水位变化计算出航标缆索调整量,通过GSM单元发送操作指令,航标中心处理单元接收到调整指令后,开启绞车调整缆索,并检测调整长度,调整到位后自动停止绞车收放,若绞车在设定时间内未停止,单片机将强制停止绞车,防止过收缆索使航标没入水中。
4 结束语
文中采用单片机与GSM模块相结合设计的遥测遥控航标设备已在某些水域航道得到应用,实际运行使用中,该设备工作稳定可靠。系统还可外加水深测量装置,根据水位深度变化控制缆绳收放,形成自闭环收放系统,实现无人值守全自动遥测遥控航标。





















