摘要:以悬臂梁为基本构架,以FBG为敏感元件,设计了一种新型的具有温度自补偿特性的FBG位移传感器方案。对悬臂梁进行分析,推导出位移传感器的传递函数,然后对其定标并实际测量,得到了传感器线性度和灵敏度同悬臂梁长度以及光纤布拉格光栅的位置之间的关系,并从结果看出本传感器精度高,运行稳定,且有好的重复性,线性范围最大为16mm。
关键词:光纤光栅;悬臂梁;位移传感器;传递函数;温度自补偿
0 引言
自从1978年K.O.Hill等人首次在锗硅光纤上用驻波持续曝光制作成第一个光纤布拉格光栅(FBG)以来,FBG的应用研究引起了全世界学者的广泛关注。光纤光栅传感器的材料优势及传感优势使FBG传感技术近年来引起人们极大的兴趣。在光纤光栅传感方案中,温度补偿的准确性和可靠性对测量结果的准确性有非常大的影响,要做到合理准确又有效的温度补偿,只能通过单个传感器的温度自补偿来实现。本文在FBG的传感机理上,依据悬臂粱结构提出一种位移传感器方案,此方案结构简单、运行稳定,且能够实现温度补偿与减小外界干扰的作用,获得较高的灵敏度。
1 原理
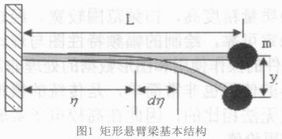
基本结构原理为,图1为矩形悬臂梁基本结构,粱长为L,梁轴线的曲率为p(η),梁的轴线称为挠度线,则曲线上任一点η处在外力F作用下的纵坐标f(η)即为该点的挠度,传振原理为,当自由端有静挠度y时,距离固定端为的截面处的静挠度f(η):
![]()
由上式可以看出η的截面处的静挠度f(η)与梁长L和距离固定端距离η都有关系,且在L一定时,η越小,f(η)越大,在一定时,L越大,f(η)越小。
FBG传感原理为,光纤光栅在受到外界因素如温度、应力等的影响时,其光栅周期和纤芯的有效折射率会发生改变,故其中心波长总是随着外界环境参数的变化而变化,那么检测中心波长的变化量就可以反映出外界环境中应力或是温度的改变量,光纤光栅中心波长产生的漂移为:
![]()
式中,εz为轴向应变,Pe为弹光系数,a∧为光纤的热膨胀系数,a0表示热光系数,△T温度的变化量。
温度自补偿原理为,当采用双光栅差分式分布在梁上下表面时,两根光栅中心波长的变化方向是相反的。两根光栅封装方式完全一样,热膨胀系数与热光系数均相同,长度一致,且两者应变等幅反向,即有:
![]()
故由两根光栅分别满足式(2),同时具有(3)(4)两式所示条件,
![]()
可以导出,可以看出,波长的漂移只和应变有关,而和温度无关,即本方案利用双光纤光栅的结构能很好地进行温度自补偿。
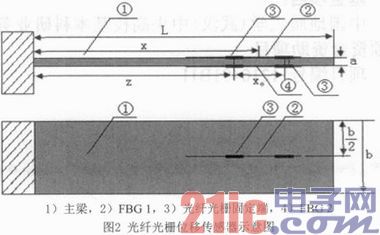
2 结构设计
本实验实际采用的悬臂梁结构如图2所示,当悬臂梁自由端因受力产生漂移时,由材料力学的知识可知,悬臂梁表面会发生应变,该应变会加载到粘贴在其表面的FBG光纤布拉格光栅上,从而使光纤光栅产生轴向应变。设悬臂梁自由端漂移量为y时,FBG 1的轴向应变为εz1,FBG 2的轴向应变为εz2。
由原理可知,当悬臂梁自由端位移漂移量为y时,传感器系统总的波长漂移量为:

式(7)为应变和波长漂移量的传递关系。
3 实验研究
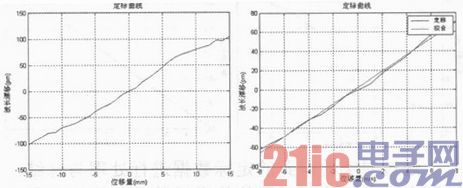
位移传感器的精度与量程同时受悬臂梁主梁长度和光纤光栅在主梁上的位置的影响。用游标卡尺定标,精度为0.02mm,每次使悬臂梁自由端变化1mm,分别测量出悬臂梁上下两个表面所粘贴的FBG的波长漂移量,经过差分计算,拟合出位移与FBG中心波长漂移量的关系式。
采用游标卡尺(精度为0.02mm)和FBG D-210型便携式光纤光栅解调仪(精度为1pm)对该仪器的输出光波波长和悬臂梁自由端位移量之间的关系进行测量。温度计(精度为0.1℃),用来测量环境温度。以下对位移传感器定标时的环境温度为12℃。
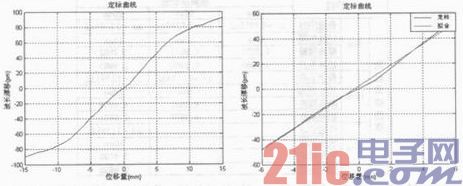
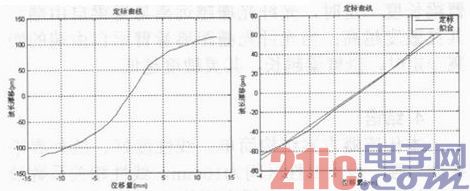
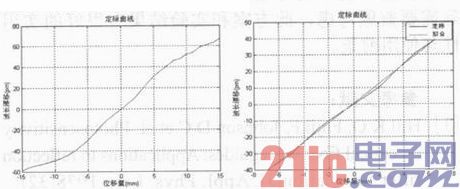
进行了六种条件下的测量,分别得到其定标曲线以及在线性区间的拟合曲线,并得到曲线拟合方程、传感器线性传导方程以及各自的线性相关系数与残差。
(1)位移传感器悬臂梁长10cm,光纤光栅距离悬臂梁自由端距离为5cm;
(2)位移传感器悬臂梁长15cm,光纤光栅距离悬臂梁自由端距离为5cm;
(3)位移传感器悬臂梁长15cm,光纤光栅距离悬臂梁自由端距离为10cm;
(4)位移传感器悬臂梁长20cm,光纤光栅距离悬臂梁自由端距离为5cm;
(5)位移传感器悬臂梁长20cm,光纤光栅距离悬臂梁自由端距离为10cm;
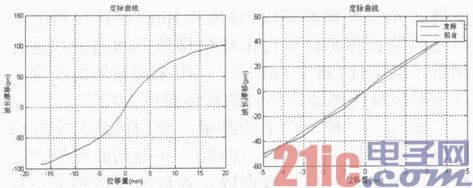
(6)位移传感器悬臂梁长20cm,光纤光栅距离悬臂梁自由端距离为15cm;
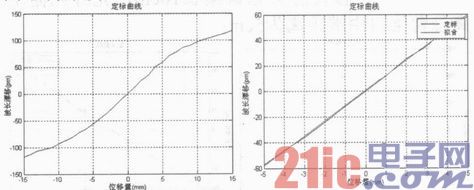
通过对实验得到的定标数据进行处理与总结,得到本方案位移传感器的传递函数及其线性范围如下表所示:

从表中可以看出,此位移传感器的线性区间最大为16mm,线性相关系数最好可达到0.9995;在悬臂梁长度一定时,光纤光栅越远离悬臂梁自由端,其灵敏度越高;当光纤光栅距离悬臂梁自由端的距离一定时,悬臂梁越长,其灵敏度越低。
4 结语
本传感器方案结构简单、线性度好、抗外界干扰能力强。最大线性区间为16mm,线性相关系数最好可达到0.9995。但光纤光栅位移传感器的灵敏度与线性度不能够同时达到最好,使用时可以根据实际需要兼顾考虑,此方案和实验结果有很好的实用性与使用前景。