1 总体设计
并联均流系统由主控模块和功率模块组成,如图1所示。主控模块和功率模块间以高效和高可靠性的CAN总线为通信媒介。主控模块完成人机交互和整机的运行监控。每个功率模块实质为单个电源模块, 按照主控模块的指令以稳压或稳流的方式工作。系统在稳流工作方式下,主控模块将设定工作电流均匀分配给每个功率模块,功率模块根据分配电流控制本模块以稳 流方式运行,从而实现系统稳流和均流。系统在稳压工作方式下,主控模块指定一个功率模块为主模块,其余为从模块。主模块按照主控模块给定的电压以稳压方式 工作,实现系统稳压。同时主控模块获取每个功率模块的电流,计算平均电流并分配给从模块,从模块按照平均电流以稳流方式工作,实现系统均流。在稳流或稳压 工作的基础上,安培时模式下主控模块统计工作安培时数,当达到设定安培时数时进行加药控制。工艺曲线模式下主控模块控制系统按照设定的稳压或稳流工作曲线工作。远程控制模式下,上位机通过与主控模块通信完成对系统的运程监控。

图1 系统总体结构图
2 系统硬件设计
2.1 主控芯片STM32F103VET6
STM32F103VET6属于STM32F103增强系列处理器,具有更多片内RAM和外设,具体特性如下:
1)采用基于哈佛架构的3级流水线内核Cortex-M3,具有单周期乘法、硬件除法特性,最高工作频率72 MHz,运算速度高达1.25DMips /MHz.
2)内置高速存储器,高达512 k字节的闪存和64 k字节的SRAM.
3)多达80个快速多功能双向I/O口,所有I/O口可以映射到16个外部中断;几乎所有端口均可容忍5V信号。
4)多达11个定时器,包括4个16位通用定时器、2个16位带死区控制的PWM高级控制定时器、2个看门狗定时器、系统时间定时器、2个用于驱动DAC的16位基本定时器。
5)多达13个通信接口,包括2个I2C接口、5个USART接口、3个SPI接口、CAN接口、USB2.0全速接口、SDIO接口。
6)3个12位A/D转换器,1μs转换时间(多达21个输入通道)和2通道12位D/A转换器。
STM32F103VET6出色的性能和丰富的资源使得几乎不需要扩展外围电路就能完全满足设计要求,使硬件设计大为简化。执行速度和内存容量完全满足 主控模块的多任务实时应用。如图1所示,主控模块设计使用STM32F103VET6的CAN、USART、USB等通信接口,CAN用于和功率模块通 信,2个USART分别用于微型打印机和485通信(上位机通信),USB用于笔记本现场配置电源系统参数。主控模块人机界面中的LCD、按键、LED指示、蜂鸣器以及加药开关,均通过GPIO连接,共计34个。
2.2 CAN通信模块
CAN通信模块是系统中最关键的通信模块,由CAN控制器、 光耦隔离和CAN总线驱动器组成(见图1)。CAN控制器集成于STM32F103VET6内部,完全支持CAN协议2.0A和2.0B,波特?最高可达 1兆位/秒。控制器内部集成3个优先级可配置的发送邮箱、2个3级深的接收FIFO、14个位宽可变的过滤器组和灵活的中断管理,可以高效地完成主控模 块与多个功率模块间的大量通信。
光耦隔离和CAN总线驱动器电路如图2所示。CAN-TX和CAN-RX是与CAN控制器相连的发送数 据线和接收数据线。由于系统输出功率大,电磁干扰强,采用高速光耦6N137将CAN控制器与CAN总线隔离。MCP2551是一个可容错的高速CAN总 线驱动器,作为CAN控制器和物理总线的接口。

图2 耦隔离和CAN总线驱动器电路
2.3 LCD模块
LCD模块是人机界面的主要组成部分。用LCD代替传统的数码管,可以应用图形交互界面,使人机交互方便友善。系统采用240x128图形点阵STN液晶模块ZLG240128A,该模块采用RA6963控制器,内建256-word的ROM字形产生器,可以显示英 文字型、数字符号等字母,并支持最大64 kByte的外部显示内存(Display RAM),具有文字显示模式、绘图显示模式及混合显示模式。LCD接口电路如图3所示,左侧LCD控制和数据线与5 V容忍GPIO连接。LCD模块的工作电压为5 V,而STM32F103VET6的输出电压为33 V,因此使用10 k排阻Rp1、Rp2作为上拉电阻,并使用GPIO的开漏模式。可变电阻VR1用于背光亮度调节。

图3 LCD接口电路
3 系统软件设计
3.1 软件总体架构
软件总体架构如图4所示。底层固件库模块由ST公司提供,包括STM32F103系列处理器所有外设驱动和应用接口。启动配置模块由汇编文件stm32f10x_startup.s构成,完成堆栈和中断向量表的初始化。硬件配置模块完成复位和时钟(RCC)、 中断控制器、GPIO、看门狗、定时器等片内外设的初始化。中断服务包括系统节拍时钟、看门狗、CAN收发、定时器、USART的中断服务程序。设计中采 用实时操作系统,便于实现人机界面、通信、控制等多个任务的协调运行,保证控制的实时性。人机界面模块包括LCD驱动、按键扫描、图形用户界面、LED和 蜂鸣器驱动,实现人机交互。工作控制模块监控多个功率模块并联运行,并实现均流。通信模块完成监控功率模块运行所需要的CAN通信和上位机远程控制时的 485通信。定时器模块提供其他模块工作所需要的定时功能。
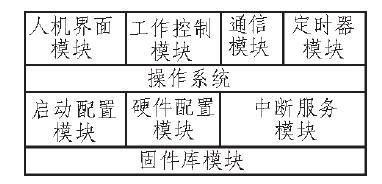
图4 软件总体架构图
3.2 工作控制模块
工作控制模块包括系统初始化和运行控制两部分。系统初始化通过读取功率模块的额定参数、统计功率模块数、计算系统总额定电流,以确定并联系统的初始配 置。运行控制按照用户指定方式,实时监控功率模块并联运行,监控流程如图5所示。首先向功率模块设置稳压或稳流工作模式以及电压或电流参数,然后发送启动 命令,使功率模块开始工作。状态查询以广播方式发送查询命令,以查询各功率模块的运行状态和参数。报文接收接收功率模块发送的查询响应报文,并从报文中获 得数据;通信检测根据是否有响应报文判断通信是否正常。数据处理根据报文接收中获得的数据计算总电流、电压、平均电流(稳压模式)、安培时(安培时模式) 等系统运行参数。故障处理检测功率模块和系统故障,进行故障处理和报警。输出处理根据当前的运行状态输出控制参数,包括软启动输出、在稳压模式下输出平均 电流、安培时模式下输出加药信号、工艺曲线模式下输出下一阶段的电压或电流参数等。停机控制在需要停机时通过发送停机命令控制功率模块停止工作。
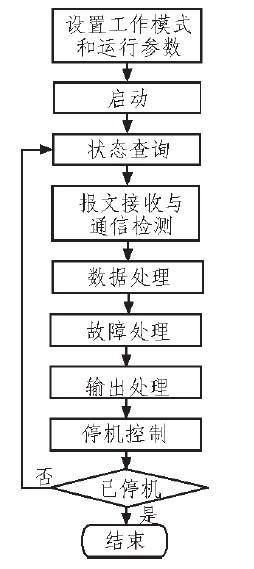
图5 运行监控流程图
4 实验应用
实验系统包含2个1 000 A/15 V的功率模块,系统在总设定电流下以稳压模式运行,测得表1中实验结果数据。
表1 稳压模式测试结果

从表中可见,均流不平衡度在5%以内,满足国家相关标准,实现了功率模块的并联运行和均流。经实际测试表明,系统其他相关指标均满足要求,系统运行稳定可靠。
5 结论
并联均流系统采用ARM芯片STM32F103作为主控芯片,利用其丰富的资源和强大性能,实现了多种外设接口并简化了硬件设计,实现了图形交互界面、基于操作系统的任务调度、CAN和上位机通信以及多种工作模式,增强了系统的功能、友善性和扩展性。