4.1 消息队列
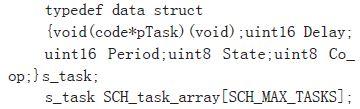
消息队列是调度器的核心,它是用户自定义的数据类型,包括了每个任务所需要的信息。尽量将其存储在DATA区,以供快速存取。
对于基于时间触发的混合式调度器,使用如下的数据结构,对于每个任务存储器的开销仅为8个字节。即使是使用32位处理器,每个任务的开销也仅为14个字节。
4.2 调度器定时器初始化函数
该函数用来产生驱动调度器的定时时标。
本文所选用AVR系列的ATmega128微控制器具有四个定时器(两个8位,两个16位),任一个都能用来驱动调度器,权衡考虑选用定时器0.
void SCH_Init_T0(void){逐个删除各个任务;停止定时器0;设置时间大小函数;使能定时器0方式;启动定时器0;}
注:在此期间不可开启总中断,即:
SREG=0×80或SEI();调度器必须先设定一个默认的时间片,这并不是件简单的事。时间片过长会导致系统对交互行为的响应表现欠佳;时间片太短又会明显地增大调度器处理耗时,而留给任务运行的时间却很短。
根据笔者经验,一个较为可取的时间片是略大于一次典型的交互所需要的时间,使大多数进程在一个时间片内完成。经反复尝试,时间片选择在1~5ms之间执行效率较高,这样既可满足响应速度的要求又能把任务执行的时间降到最低。该时间与任务个数和任务运行时间均有关,具体大小视情况而定。
4.3 中断服务程序
建议该函数由CTC方式激活,当某任务需要运行时,使之处于就绪态等待被执行。该函数内容由具体任务而定。
4.4 调度器任务添加函数
该函数用来将任务添加到消息队列,以保证条件满足时被调用,函数如下所示:

{定义静态变量i;循环判断任务队列是否有空间;若无,报错返回;否则,添加任务;}
4.5 调度函数
刷新函数虽然能够直接激活任务,但若直接运行,长任务将破坏时标中断,这意味着所有的系统定时都将受到严重影响,造成许多任务不能被调度。因此,为了在长任务存在的情况下使调度器的可靠性最大化,分离刷新和调度这两个操作是必要的。
时间触发嵌入式系统采用的是FCFS算法,为了提高系统的响应速度,必须要求Durationtask
void SCH_Dispatch_Tasks(void){定义静态变量i;如果运行标志位大于0,则执行该任务;该标志位清零;如果是单次任务,则将其删除;}
4.6 调度器任务删除函数
void SCH_Delete_Task(const uint8task_id){定义 静态返回值;若指针函数为空,返回空闲代码;否则,对其延迟、周期、状态等变量清零;返回代码;}