现今社会,自动化装置无所不在,在控制技术需求的推动下,控制理论本身也取得了显著的进步。水塔水位的监测和控制,再也不需要人工进行操作。实践证明,自动化操作,具有不可替代的应用价值。水塔水位自动控制器,具有适应各种液体液位的检测和控制的功能,设计中分析了利弊,考虑了各种液体的阻值大小,是可以投入实际生产的产品。
1设计分析:
“水塔水位自动控制系统”的控制对象为水泵,容器为水塔或储液罐。水位高度正常情况下控制在C、D之间,如图1(a)。当水位在低于C点时,水泵开始进水,如图1(b)。当水位高于D点时,水泵停止进水,如图1(c)。当水位低于C点并到达B点时就报警,采取手动启动水泵,如图1(d)。当水位超过D点并到达E点时上限报警,采取强制停止水泵,水位从溢流口流出,如图1(e)。

图1设计分析示意图
为了精确的实现对水位的控制,必须建立闭环控制系统。根据水塔中的进、出水的水位可以自动控制水泵,使水位处于动态的平衡状态。
2现有设计方案的分析:
(1)555定时器组成的水位自动控制器。图2可以看出,电路设计过于简单化,没有考虑异常情况的排除方法。例如:探头发生故障,则此系统无法检测,导致水位控制器操作异常;没有设计报警电路,无法方便地读取水位实际数值。
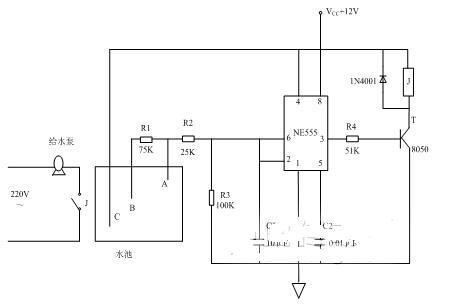
图2水位自动控制系统
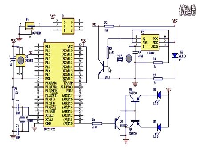
(2)用51单片机设计的水位自动控制系统。51单片机实际是个小的微型机,除了硬件电路的搭接外,还需要软件的开发和应用。这样会使设计变得很繁琐,同时从电磁兼容方面考虑,软件设计存在系统地不稳定性。在实际应用中,为了满足工厂的实际条件,大部分自动化控制装置采用纯硬件的电路设计。此外,该电路不能检测液体的电导率,不适用水塔中液体性质改变的情况。
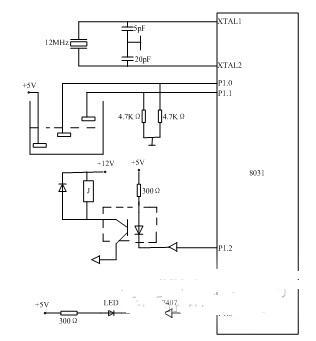
图3水塔水位控制电路
3最优方案:
3.1系统框图
控制系统主要分为模拟检测和逻辑判断两大块。如图4所示,模拟检测实际上测量的是B、C、D、E四个探头相对于A点(即地)电位的高低,在水塔中清水里的四个探头B、C、D、E各点和探头A点之间实际上相当于一个可变电阻。当电阻值发生变化时,各点的电位值不同,通过逻辑判断,就得到不同的输出,即操作控制不同的动作。
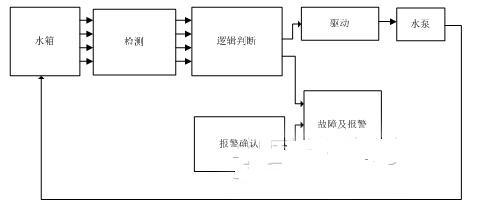
图4系统框图
3.2原理图
图5为最优方案的原理图。如图所示:水位正常情况下应处于C、D之间,此时,BCDE四个探头的逻辑电平为0011,即保持状态;当水位低于C点,处于B、C之间时,BCDE四个探头的逻辑电平为0111,即进水状态;当水位高于D点,处于D、E之间时,BCDE四个探头的逻辑电平为0001,即停进状态;当水位低于B点或水位高于E点,此时,BCDE四个探头的逻辑电平为1111或0000时,水塔水位的报警电路开始工作,产生下限报警或上限报警,即低报和高报。这时,需要工作人员进行手动关闭报警设备才可以解除警报。
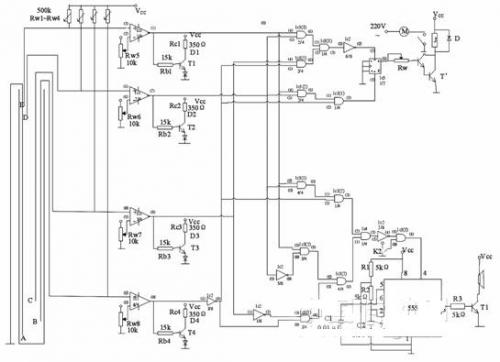
图5水塔供水系统的最终连线图
3.3系统优化
从图5中可以看出,B、C、D、E四个探头每个都接有一个运算放大器。实际运行中,当某个探头出现故障时,系统可以及时检测到,不会造成误动作的产生。同时,新增了报警确认电路。这样,当误动作产生以及水塔内水位的过低或者过高,都会启动报警装置。一旦系统发生报警,就可以及时去处理问题。问题处理完毕之后,工作人员可以手动关闭报警装置。因此,优化的方案增强了系统的可靠性、稳定性和实用性。
4水塔水位控制器的可行性试验
4.1可行性试验
图6为水塔水位控制器的外观正视图,由电源指示灯、报警确认灯、水位指示灯以及报警确认开关组成。接通电源时,电源指示灯亮,当水塔中水深处于不同位置时,水位指示灯B、C、D、E情况不同。
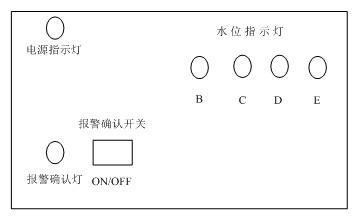
图6水塔水位控制器外观图
①当水位处于B点之下,指示灯B、C、D、E全亮,报警电路开始报警,即下限报警。
②当水位处于B、C之间,指示灯B灭,C、D、E亮,水泵开始进水。
③当水位处于C、D之间,指示灯B、C灭,C、D亮,保持状态,即保持进水。
④当水位处于D、E之间,指示灯B、C、D灭,E亮,停进状态,即水泵不工作。
⑤当水位处于E点之上,指示灯B、C、D、E全灭,水泵不工作,报警电路开始溢出报警,即上限报警。
⑥报警电路可以手动关闭,只要按下报警确认开关,就可以解除报警的蜂鸣声。此时,报警确认灯亮起。处理完故障时,必须关闭报警确认灯,报警确认电路复位,恢复其监测故障的功能。
4.2可行性分析
此方案采用纯硬件电路设计,避免了软件程序设计中的不稳定因素,提高了实际运用中的可靠性。同时,对于不同类型的液体,此系统均有良好的兼容性。当水塔中液体改变时,只需要将电位器中的阻值和该液体的阻值调节到一个数量级上就可以很方便的实现此液体的水位控制操作。试验证明,此水塔水位控制器不仅实现了对水塔水位的精确控制,而且,此系统更具有工业生产的实际性。
5结束语
本文通过介绍自行设计的水塔水位控制器,系统地阐述了设计方案及成品试验。试验证明,该系统在运行期间稳定性高,完全符合预先规定的标准,是可以投入生产的水塔水位控制器。

![[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用](/Uploads/2014_12/video/vi8fc8d028840bfa6c191d73d8eafcc08b_s.jpg)