摘要:设计一个基于Zigbee的智能灯光跟随系统。系统中连接有人体红外热释电传感器的ZigBee结点等距离分布在走廊或道路的旁边,检测特定区域人员是否存在的信息,并将信息传于协调器节点,协调器节点连接主控制器PXA270,PXA270根据采集的信息控制舵机的转向和照明装置的亮与灭,实现有人走动存在时,灯光随着人的转移而转移,无人时照明系统自动熄灭,从而实现节约能源的效果。
关键词:灯光跟随;Zigbee;热释电人体红外感应;无线传感器;PXA270
目前,在我国,资源消耗高、浪费大等问题很严重,随着经济的快速增长和人口的不断增加,资源不足的矛盾更加突出,建设节约型社会已刻不容缓。节约不仅要减少消费,而且要提高利用效率。建设节约型社会的最大动力在于科技创新。节能性产品成为社会追求的目标。
ZigBee是一种便宜的,低功耗的近距离无线组网通讯技术。Zigbee无线传感器网络以其自组网,体积小,低功耗的优势已在很多地方得到应用。基于此,本文设计了一种基于Zigbee无线传感器网络的智能灯光跟随系统,该系统利用Zigbee无线传感器网络和嵌入式控制器,实现了有人时,灯光紧随人的移动而移动,无人时,灯自动熄灭。避免了长时间、大范围不必要的照明造成的电能的浪费,达到节能的效果。
1 系统的总体构架
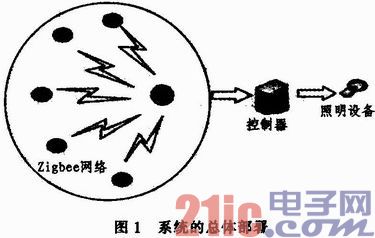
整个系统的布署的拓扑结构如图1,该系统基于Zigbee的WSN技术,利用Zigbee的低耗能,低成本,高扩充性,免频段使用费的优点,构建一个无线传感器网络。该系统可分为Zigbee无线传感器网络,嵌入式控制机构和执行装置,Zigbee无线传感器网络是由一个协调器节点和若干传感器节点组成的星型网络,负责采集环境中人员存在方位的信息;Zigbee网络中传感器节点分布在房间和走廊的各个角落,实时监测特定区域的人员存在方位的信息。协调器节点负责建立并维护网络,收集到传感器节点采集刭的信息,并通过UART方式传给主控制器。主控制器分析采集的数据,判断人员的方位,控制舵机的转向和灯的亮和灭,实现灯光跟随功能。
2 系统的硬件设计
本系统的硬件主要包括3部分:无线传感器网络,嵌入式器PXA270和舵机、照明设备执行机构。
2.1 Zigbee无线传感器网络
本系统采用的无线传感器网络的核心是基于TI公司生产的CC2430开发的无线模块,CC2430结合一个高性能2.4 GHz DSSS射频收发器核心和一颗工业级小巧高效的8051控制器,拥有8~14位ADC、DMA,定时、计数器、USABT、AES-128协处理器、睡眠模式定时器、看门狗、上电
复位和掉电检测电路以及21个可编程引脚,是一颗真正的系统芯片(SoC)CMOS解决方案。
系统中的无线传感器网络由一个协调器节点和若干传感器节点组成,传感器节点由数据采集模块,数据处理模块,无线通信模块,电源模块组成,电路图如图2所示。
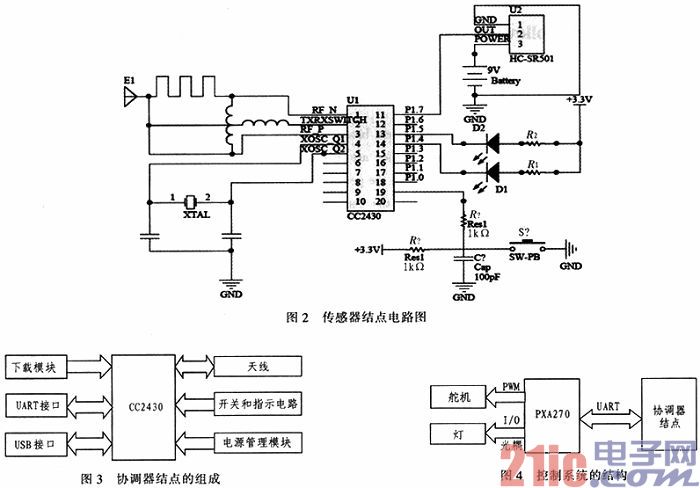
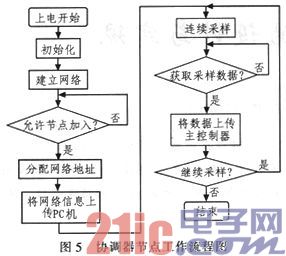
连接人体红外模块HC-SR501。HC-SB501是基于红外线技术的自动控制模块,采用德国原装进口LHI778探头设计,灵敏度高,可靠性强。人进入其感应范围则输出高电平,人离开感应范围则自动延时关闭高电平,输出低电平。人体红外传感器的OUT输出端口连接到CC2430的I/O口上,把I/O口设置为输入模式,通过检测I/O端口的高低电平就能得到人员是否存在的信息。协调器节点功能相当于网关节点,在本系统中充当与主控制器通信的硬件,其组成如图3所示,包括CC2430射频模块,仿真下载模块,UABT,开关和LED指示灯。Zigbee节点组成星状网络,所有的传感器节点都将采集到的信息实时发送到协调器节点。
2.2 嵌入式控制平台和执行机构
系统中采用的主控制器为Intel公司生产的PXA270,PXA270基于ARMv5E的Xscale核心,最高频率可达624 MHz,是一款性能极其强劲的嵌入式处理器,系统的控制机构结构如图4,PXA270通过串口连接Zigbee协调器节点,通过PWM模块堆垛机进行控制,I/O端口连接光耦芯片TPL521-4,利用I/O口的高低电平控制TPL521-4输出的导通和截止,照明装置的电源线连接到TPL521-4的输出端口,并固定在在舵机上,随舵机而转动。
3 系统的软件设计
3.1 无线传感器网络的设计
系统中Zigbee节点的软件设计移植了Z-stack协议栈,该协议栈提供了完整的路由协议,并对应用层是完全透明的,只需将数据下发至协议栈,协议栈便会自动寻找路径,因此在程序开发上,主要是在Z-stack协议栈的基础上,完成协调器节点和传感器节点的程序设计。
1)协调器节点的软件设计
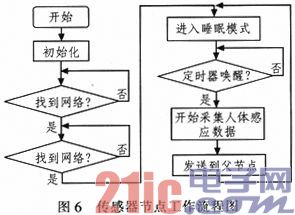
协调器节点是整个网络的核心,负责网络的建立和管理,工作流程图如图5所示。系统上电后,首先初始化硬件和协议栈,初始化完成后,协议栈扫描出一个合适的信道建立一个网络。当有设备请求加入时,协调器负责分配它一个16位的短地址,并允许加入网络,组网完成后,协调器节点开始接受从传感器节点传送过来的数据并通过串口传至嵌入式控制器。
2)传感器节点的设计
传感器节点工作流程图如图6,其主要通过无线传输的方式,将采集到的人员信息送至协调器节点。完成CC2430的初始化后,开始扫瞄信道,寻找到合适的网络,发进加入网络信息,得到确认后,开始进入休眠状态,等待定时器唤醒,收到唤醒指令后,开始通过传感器采集信息,并发至其父节点。
3.2 嵌入式控制器的软件设计
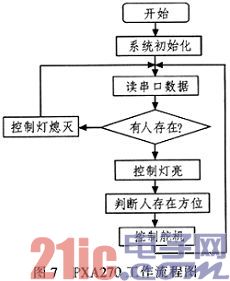
PXA270通过串口接收Zigbee节点采集到的信息,根据Zigbee的16位物理地址和相应采集到人是否存在的信息来确定人员的方位,工作流程如图7所示,首先,检测是否有节点返回有人存在的信息,如果无人存在,则把I/O口的输出设置为低电平,使灯熄灭,否则,I/O设置为高电平,灯亮起,然后根据返回的Zigbee的物理地址,判断是哪个节点返回的信息,从而确定人员存在的大致方位,进而控制舵机转动,使灯光照向这个方位。
4 系统测试
实验时,在实验室搭建了1个小的模型,其中的无线传感器网络包含1个协调器节点和3个传感器节点(Zigbee节点实物如图8),传感器节点均匀地分布在走廊的两侧,PXA270和照明装置(实物如图9)放在了较高的柜子上。
Zigbee节点上电后,过了大约5 s,开发板上的led显示网络建立完成,当人走过时,灯自动的开启,舵机转动,照向人存在的方位,当人走动的时侯,舵机随之转动。当人离开检测区域时,照明装置自动熄灭,实验结果表明,该系统可以正常工作。
5 结束语
文中采用无线传感器技术、Zigbee技术、传感器技术、嵌入式技术和计算机技术构建智能灯光跟随系统,实现对人体的检测并使灯光跟随人体移动,从而达到节能环保的效果。本系统具有成本低、低功耗、检测准确、实用性强等特点,非常适合在走廊、道路等场所使用,具有很好的经济效益和社会价值。目前,我们尚处在实验阶段,正在进行产品化过渡。


![[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用](/Uploads/2014_12/video/vi8fc8d028840bfa6c191d73d8eafcc08b_s.jpg)























