摘要:文章根据脉冲激光功率的特点,通过系统硬件和软件的设计,实现了对脉冲激光功率的采集和控制。具体为以峰值保持电路为主的小信号采集电路的设计实现了脉冲光功率的采集,以PID为主的软件设计又完成了光功率的稳恒输出。此系统的设计能成功地用在激光打标机功率控制系统中。
关键词:脉冲激光;光功率;比例积分微分算法
0 引言
近几年来光纤激光器在激光打标和激光加工方面取得了迅速的发展,而用于激光打标和加工方面的激光器一般采用峰值功率较高的脉冲光纤激光器。激光功率是激光器最主要的参量,激光输出功率严重的影响着激光加工的质量。在激光加工过程中,如何能实时监控激光功率的变化,提高激光功率的稳定性和控制精度,对产品的精密加工有着极其重要的作用。此类型激光器其功率值在不同的加工设计中其平均功率是变化的,这就给光功率的实时采集和控制带来的麻烦。本文通过对脉冲光信号的研究,设计出了基于峰值保持电路的小信号处理电路,和基于PID算法的单片机控制系统。通过硬件电路和软件系统的设计解决了光纤激光器中脉冲激光的采集和光功率稳恒的问题。
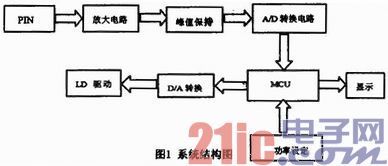
系统的硬件电路框图如图1所示,PIN管对激光器中的脉冲光进行采集,把脉冲式的光信号转换成脉冲式的电信号。采集到的脉冲光信号经放大电路进行放大,本设计采用了两级放大,将小信号放大到能够进行处理的信号。然后经峰值保持电路采集峰值电压(此峰值电压与光信号的功率成线性关系)。在经过A/D转换电路将峰值电压信号转换成数字信号在单片机中进行处理。在单片机中主要运用了PID算法对功率进行控制,将调节后的值送给LD驱动电路进行功率调节。最终使功率稳定地输出。
2 系统的硬件电路设计
2.1 光电转换部分
本论文的光电采集部分主要用了PIN光电二极管,PIN管能很好地将光信号转换成电信号。PIN二极管对低频信号具有整流作用,而对高频信号则具有阻抗作用。PIN光电二极管具有以下优点:响应速度快;线性好、频带宽、信号失真小;噪声低,器件本身对信号影响小;体积小、寿命长、可靠性高、工作电压低。其采集到的脉冲峰值电压与光功率成线性关系。所以可以通过采集峰值电压的信号来对光功率进行采集处理。
2.2 小信号处理电路
小信号处理电路主要包括小信号放大电路和峰值保持电路。
2.2.1 小信号放大部分
本设计采用两级放大电路对微弱电信号进行放大,一般光电探测器输出的电压幅值为几百微伏到几百毫伏的级别,应适当选择放大倍数将信号放大到可处理的幅度。这里选用Texas Instruments的低功耗、高精度运算放大器opa234。
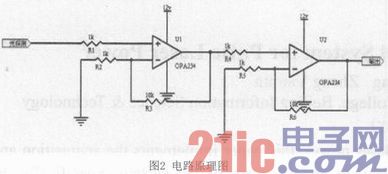
放大部分的电路原理图如图2所示,经过精密运放opa234的两级放大,把光探测器采集到的微弱电信号放大为伏级别的电压。
2.2.2 峰值保持部分
峰值保持电路用于处理信息与峰值有一定关系的信号,能跟随输入信号变化,并能将最大值记录下来,在工业过程自动检测中往往用此电路将某些物理量,如温度、压力、功率等最大值保留下来进行分析、处理。
如图3,峰值保持电路主要由电压跟随器、半波整流电路、积分电容和复位开关组成,完成了信号峰值的采样和保持。峰值保持电路的原理图如图3所示。
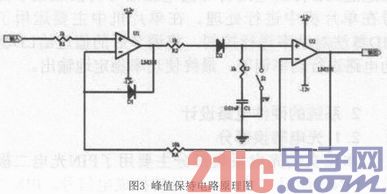
前级运放构成半波整流信号,后级运放为电压跟随,使电压增益为1。保持电容主要用于记忆输入信号的大小,控制开关则用于控制采样保持的时间。当输入电压大于输出电压时,二极管D2导通,积分电容C1充电至U1输出端,由于二极管D2的单向导电性,在开关断开时,积分电容C1保持峰值电压,直到下次复位信号的到来。
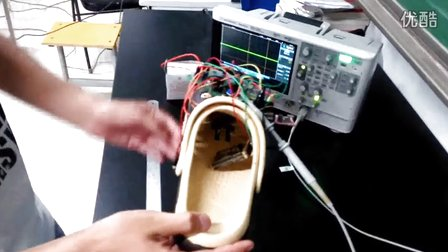
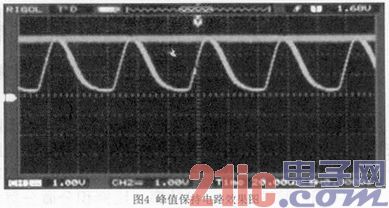
峰值保持电路的硬件测试图如图4所示。
2.3 单片机系统部分
因为在其他工作中需要的单片机管脚要充足,所以本设计选用了单片机的型号为c8051f020。该单片机是完全集成混合信号系统级MCU芯片,含64kFlash,100管脚封装,一个12bit的和一个8bitADC,一个12bit的DAC。并且内含看门狗定时器、时钟振荡器,是真正的片上系统。主要完成输入峰值电压的A/D转换、积分复位、对输入功率进行PID算法的控制,最终实现功率的稳恒输出。
A/D转换部分:峰值保持的模拟电压信号接到单片机8位A/D转换的输入端,在程序控制下实现A/D转换。复位:每次A/D转换之前通过复位按钮,使积分电容C上的电压放电,准备下一次峰值保持。为了保证积分电容的电完全放完,复位电平应维持几十μs的时间。对输入的8位数字信号通过PID参数的设定,应用PID算法对功率进行调节。
3 系统的软件部分设计
3.1 总体系统设计
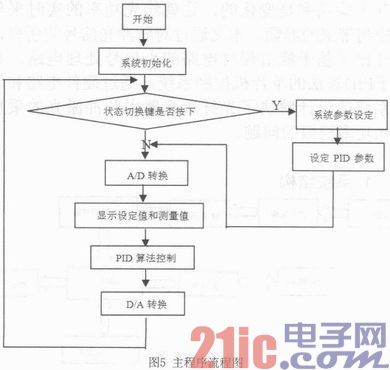
系统的软件部分主要包括系统的初始化、启动A/D转换、PID算法控制、LCD显示、D/A转换。
主程序流程图如图5所示。
3.2 PID算法程序设计
3.2.1 PID算法原理
PID算法是过程控制系统中应用最广泛的一种控制方法,数字式PID控制就是将模拟PID控制离散化。数字式PID系统框图如图6所示。
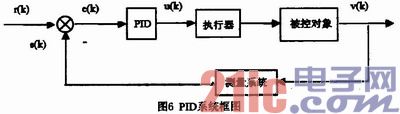
数字式PID控制是一种采样控制,需根据采样时刻的偏差量计算输出控制量,e(k)=s(k)-r(k)。然后经过对偏差e(k)进行比例、积分、微分,可到控制量。
3.2.2 PID参数特性
P(比例):比例系数加大,系统的动作灵敏,速度加快,稳态误差减小,但如果比例系数偏大的话又会导致振荡次数加多,调节时间加长。
I(积分):积分会使系统的稳定性下降,但能消除稳态误差,提高系统的控制精度。
D(微分):微分作用可以改善动态特性,微分系数偏大,超调量较大,调节时间较长,微分系数偏小时,超调量也会变大,调节时间变长。所以只有微分系数合适时才能使超调量较小,减短调节时间。
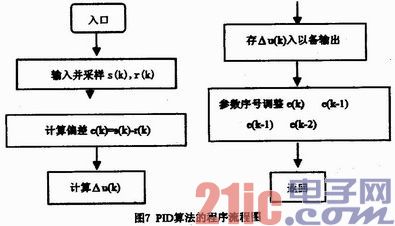
3.2.3 增量PID控制算法和程序流程

式中u(k)为第k次采样时刻输出,△u(k)为第k次采样时的输出增量,在计算控制中,通过参数整定,参数都可以求出,所以实际控制中只需要求出e(k),e(k-1),e(k-2)三个有限偏差值就可以求出控制增量。图7为其流程图。
3.2.4 PID参数的确定
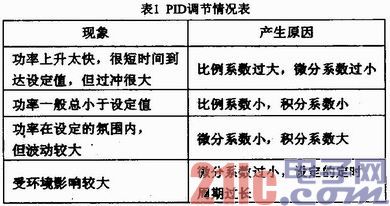
PID控制最困难的部分是比例、积分、微分三个参数的设置与调整。编程时只是设定大概的数值,然后通过PID参数特性进行反复的现场调试,最终找到相对理想的参数值。通过PID参数特性可以得到不同效果PID参数调节的情况。表1和表2分别为调节情况表和测试数据表。

3.3 测试数据分析
通过数据分析可得,功率一般保持在0.2W以内。稳定性满足要求。最终实现了功率的稳恒输出。
4 小结
本设计对脉冲激光功率的采集及处理做了较为详细的介绍,主要从软件和硬件两个方面给予了说明。最终实现了脉冲光功率的稳定输出,为脉冲激光器控制系统的设计做了充分的准备,实验结果较为理想。本设计也可用在其他脉冲信号的处理方面。