嵌入式系统目前已广泛应用于信息家电、网络通信和工业控制等各个领域。典型的嵌入式系统主要由嵌入式硬件和软件构成,其中硬件部分的核心为嵌入式处理器。
ARM系列内核是目前嵌入式处理器中广泛使用的内核。采用ARM内核的处理器具有体积小、功耗低、成本低和性能高的特点。在全球有众多生产arm内核处理器的厂商。
Linux是一种很受欢迎的开放源码操作系统,原先被设计应用于桌面系统,后被广泛应用于服务器。由于其开放源码和内核可裁减等特性,Linux逐渐被修改用于嵌入式领域。目前已有多个嵌入式应用的版本,μClinux是其中的一个分支,最早被设计应用于微控制领域。其最大特征就是没有MMU(内存管理单元),很适合于许多低端的、没有MMU的嵌入式处理器。
本文设计了一种嵌入式系统用于多媒体实时数据的网络传输。ARM内核处理器与嵌入式 Linux 是目前嵌入式应用中的一种典型组合,选用了 Samsung 公司的16/32位arm7TDMI 内核的网络处理器 S3C4510B 为嵌入式硬件核心,μClinux为操作系统。该系统支持完整的TCP/IP协议以及许多其它的网络协议,同时它具有很低的成本。
1 嵌入式系统的构成
1.1 硬件系统
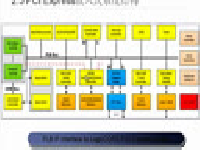
嵌入式硬件系统主要由 CPU、Flash ROM、SDRAM、以太网物理层、FIFO以及CPLD等芯片构成,如图1所示。
(1) CPU
本系统采用了arm7TDMI 内核的 RISC 处理器S3C4510B。该芯片具有如下一些主要特点:
8/16/32位的外部总线支持 ROM、RAM、Flash存储器、DRAM 和外部I/O;
8K 字节的 Cache;
一个I2C 接口;
一个带 MII 接口的100Mbps/10Mbps 以太网控制器;
两个 UART 通道;
两个通用 DMA 通道;
两个 HDLC 通道;
18个通用I/0通道;
两个32位定时器;
共有21个中断源,其中4个用于外部中断;
一个内部 PLL 用于提供高频率的系统时钟,最高系统时钟可达50MHz。
由此可见,S3C4510B 很适用于低端的网络设备,如集线器、交换机、家庭网关等。
(2)Flash ROM 和 SDRAM
Flash ROM 和 SDRAM 构成了系统的存储空间。其中Flash ROM 作为程序存储器,用于存放操作系统、应用程序等;SDRAM为系统内存。
(3)以太网物理层和串行接口芯片
CPU 内部的以太网控制器只提供了MAC(媒体接入控制器),需在外部接一个物理层芯片完成编解码和时钟恢复等功能。串行接口芯片主要完成串行线路接口的电平转换。
(4)CPLD 和 FIFO
为了能使系统支持实时数据通信,需要在外设和嵌入式系统的外部总线之间加上 FIFO 和CPLD。FIFO 用于数据缓冲,CPLD 用于产生 FIFO控制逻辑和外部总线控制逻辑。
1.2 操作系统
arm7TDMI 内核已被众多的嵌入式操作系统所支持,如 VxWorks、pSOS 及 Nucleus 等。这些商业化操作系统在网络和用户图形界面等方面都有很好的支持,并且在稳定性和实时性方面都有相应的保证,但其价格也相当高。这里选用了开放源码的嵌入式 Linux,它一般免费或花较少的费用就可得到,同时它在网络和图形界面方面也有很好的支持。另外,嵌入式 Linux 的高度模块化使它可以根据实际应用需要灵活配置,能有效精简内核代码。嵌入式 Linux 具有很高的稳定性。在实时性方面,尽管 Linux 本身未作过多关注,但可通过打实时 Linux(RTLinux)补丁解决。
针对所采用的 CPU 没有 MMU,选用了目前在嵌入式系统中被广泛使用的μClinux。μClinux 是从标准的Linux 2.0 内核发展而来的,但其源代码针对典型的嵌入式应用已经作了许多精简和修改,使得其内核比标准的 Linux 内核要小很多,不过它仍然保留了标准 Linux的主要特色。
目前最新的μClinux 版本已经支持 S3C4510B 及典型开发板,如果所采用的 CPU及开发板没有被支持,应根据实际情况移植。此外,由于在外部总线接了 CPLD和 FIFO,为了使应用程序能访问它,需要在μClinux 下开发相应的驱动程序。
2 实时数据接口的扩展
2.1 应用要求
将上述嵌入式系统应用于实时多媒体数据的网络传输,如图2所示。这里的实时多媒体可以是 MPEG-4或 MPEG-2 等,其数据流一般是连续、恒定码率的。
2.2 硬件扩展
根据上述数据流的特点,需在嵌入式系统与外设(编、解码器)之间加入数据缓冲控制单元。对于发送端和接收端,数据缓冲控制单元的设计有所不同,下面以MPEG-2 为例说明。这里考虑系统的处理能力、网络的承受能力以及图像质量,MPEG-2 的输出为 4Mbps 的CBR(固定比特率)TS流。
2.2.1 发送端
编码器送出连续、恒定速率的码流。如果将此码流直接送到 CPU 外部总线,将会导致操作系统频繁地处理中断,甚至会产生中断不能及时处理从而导致数据丢失。因此,有必要在编码器与外部总线之间加上 FIFO,同时用 CPLD 实现 FIFO 的读写控制逻辑。编码器送出的数据流连续不断地以恒定速率写入FIFO;当FIFO中的数据积聚到一定值后,每写入若干个数据就向CPU发一个中断;CPU在收到中断后通过外部总线读入相当量的数据,并将其打包送入网络。正常情况下,每个中断读数据个数是一定的,在一段时间内FIFO写入和读出将维持平衡,且不会产生“饥饿”状态;当操作系统因处理别的任务而没有及时响应中断时,FIFO将暂时进入“饱和”状态,但只要FIFO容量足够大就不会产生数据溢出现象。由于CPU从FIFO读取单位数据的速度大大高于外设向FIFO写单位数据的速度,“饱和”状态一般能消除。由此,可以解决前述问题。
2.2.2 接收端
在接收端,由于解码器的输入要求是一个连续、恒定速率的码流,同样要求在CPU外部总线与编码器之间加上FIFO和CPLD。同时,接收端的数据包由于经过了网络,不可避免地会引入延时,且数据包之间的延时是不确定的,甚至会产生数据包的丢失。这些都需要在接收端予以考虑,增加了接收端数据缓冲控制单元的复杂度。
为了解决数据包到达延时及抖动问题(数据包的丢失将间接导致延时的增加),可以简单地靠增大FIFO容量解决。但增大FIFO将意味着从编码器到解码器之间延时的增加,影响了实时性。因此,为了保证一定的实时性,同时考虑成本因素,不能单纯靠增大FIFO解决。
由于FIFO容量的限制,在出现大延时的情况下,FIFO将可能出现“空”状态。这意味着送给解码器的数据流会有中断,从而可能导致解码器的不正常工作并可能不能恢复(在数据流恢复正常后)。为此,需要在FIFO出现“空”状态之前,即处于“饥饿”状态时(可以设置一个阈值),由CPLD停止向FIFO读数据而向解码器发填充包。填充包中含有同步头,可以维持解码器的同步。短时间的插空包会使视频图像出现马赛克,如果时间过长,可能会出现黑屏。在实际试验中,接收端视频的质量与网络的负载情况有关。当网络负载较重时,图像会出现马赛克,黑屏现象一般极少发生。
2.3 驱动程序
为了使μClinux下的应用程序能通过外部总线访问FIFO,需要编写相应的驱动程序。驱动程序主要包括三个基本部分,即CPU相关寄存器的初始化设置以及CPU对外部I/O口的读操作和写操作。其中,初始化设置主要包括中断号及其类型设置、外部I/O口数据位宽度和读写时序设置等。