基于PC104与C8051F120的水下机器人环境监测系统设计.pdf
时间:08-27 11:24
查看:2466次
下载:162次
简介:
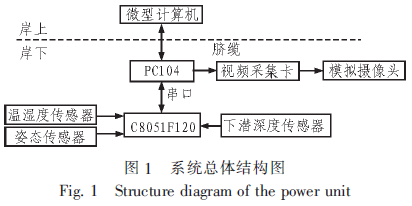
为了实现对水下机器人周围环境的监测,提出了一种基于PC104与C8051F120的水下机器人环境监测系统设计方案,并完成系统的软硬件设计。该系统的硬件部分主要是采集下潜深度传感器、姿态传感器、温湿度传感器的数据,软件部分采用用Visual C++ 6.0设计了监控界面。该系统能够实时显示视频和各传感器数据。实际测试表明,该系统具有稳定性高、准确性高的特点,达到了设计要求。