第九届飞思卡尔智能车-电磁组-浙江大学-浙大一队
时间:11-03 10:19
查看:1227次
下载:163次
简介:
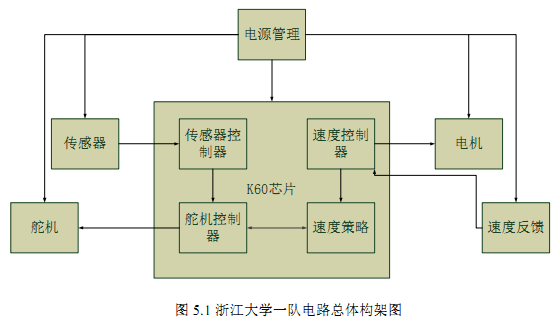
本智能小车以飞思卡尔32 位微控制MK60DN512ZVLL10 作为唯一的核心控制单元,采用电感线圈和干簧管获取道路信息,通过设计简单的PID 速度控制器和简单的PID 方向控制器实时调整小车的速度与转角。
本报告分为九个章节:第一章为引言介绍;第二章为方案设计;第三章具体介绍了机械结构调整;第四章为传感器的选择和布局;第五章为电路的设计说明;第六章介绍了智能车软件设计;第七章为赛车的主要技术参数;第八章为结论。