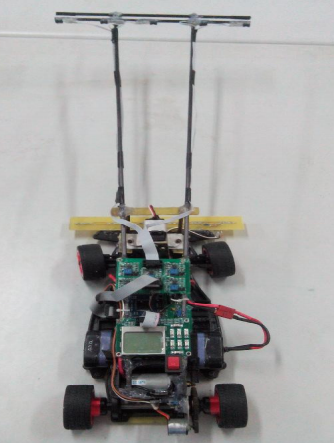
在选定智能汽车系统采用电感检测道路、干簧管检测起跑线的方案,赛车的位置信号由车体前方的电磁传感器采集,经 MCU 的 AD 口接收转换后,用于赛车的运动控制决策,同时内部发出 PWM 波,驱动直流电机对智能汽车进行加速和减速控制,以及伺服电机对赛车进行转向控制,使赛车在赛道上能够自主巡线行驶,并以最短的时间最快的速度跑完全程 为了对赛车的速度进行精确的控制,在智能汽车电机输出轴上安装光电编码器,采集编码器转动时的脉冲信号,经 MCU 捕获后定时进行 PID 自动控制,完成智能汽车速的闭环控制。
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
1.HJ-4WD智能小车零基础操作篇1-新手必看(全屏高清)
11.C51智能小车零基础入门篇1—51单片机最小系统(全屏高清)
25.C51智能小车提高篇2—STC12C5A60S2内置看门狗实验(全屏高清)
11.HJ-4WD智能小车入门篇1—51单片机最小系统(全屏高清)
智能小车视频教程 18-1、循迹小车
智能小车视频教程 20-1 红外避障实验
37.HJ-4WD智能小车扩展篇7—4WD智能小车超声波避障舵机转动实验(全屏高清)
Cocktail
x