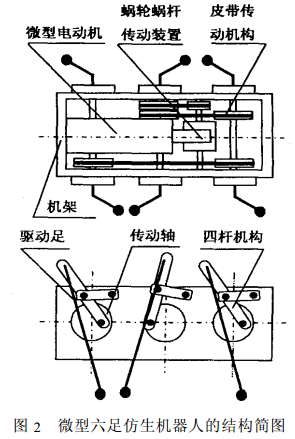
本文描述了一种微型六足仿生机器人的结构与控制。分析了这种微型六足仿生机器人的移动原理,该机器人基于仿生学原理。结构独特、简单、新颖,能方便地实现前进和后退,其样机外形尺寸为:长30mm,宽40mm,高20mm,重6.3g.并对该样机进行了实验,实验结果表明该机器人具有较好的机动性.
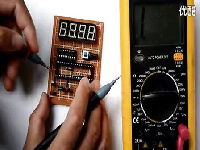
单片机毕设调试指导视频9、继电器调试与外接负载方法
基于FPGA的交通灯设计(非单片机)-红外遥控通行状态
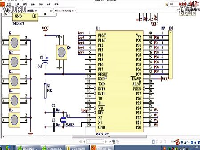
单片机毕设调试指导视频7、从protel中粘贴清晰图
单片机毕设调试指导视频8、芯片引脚说明
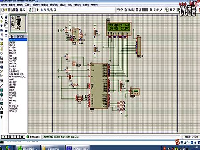
单片机毕设调试指导视频10、仿真软件怎么用(入门)
单片机毕设调试指导视频6、按键轻触按键的调试方法
单片机毕设调试指导视频4、数码管电路调试方法
单片机毕设调试指导视频2、LCD1602液晶的调试方法
x