轮式机器人控制系统设计
时间:12-02 08:54
查看:1479次
下载:162次
简介:
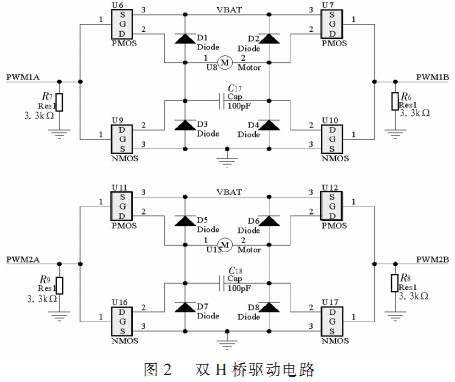
设计了一套基于直流电机的轮式机器人大功率驱动控制系统。本系统采用双H桥结构驱动两个电机,并以AVR单片机Atmega168为处理器实现电机控制。通过单片机定时器的快速PWM(脉宽调制)模式输出不同占空比的PWM信号,送给H桥,从而控制电机的转速。本系统以DXP2004为平台设计了电路原理图和大功率PCB(印刷电路板),并使用AVR Studio和WinAVR工具配合开发单片机程序,电路实测达到10 A以上驱动电流。