基于DSP的电动加载控制器设计.pdf
时间:12-17 11:18
查看:1006次
下载:162次
简介:
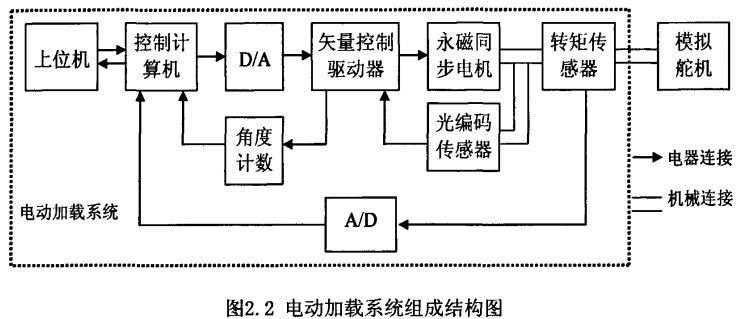
论文提出了具体的电动加载控制器设计方案,研究了基于前馈校正和闭环PID的控制方法,以矢量控制永磁同步电机模型为对象,利用Simulinkl具对多余力矩的产生、多余力抑制方法及PID闭环控制等内容进行了仿真分析。本文设计了以DSP TMS320F2812为核心的硬件电路,实现了A/D、D/A、正交编码脉冲单元、SCI通信模块及I/O等各部件的联接调试,讨论了硬件电路的可靠性和抗干扰措施。