走迷宫智能小车主要是基于自主反应式智能系统原理。利用反射式红外传感器来导引,采用与地面颜色有较大差别的导引线,红外一体化接收头来检测障碍物的位置,通过改变单片机产生的PWM方波的占空比,使其能在设计范围内可实现任意角度移动,实现小车识别路线,进行自主迷宫探路,判断并实现自动避障,选择正确的行进路线。驱动电机采用直流电机,电机控制方式为单向PWM开环控制。控制核心采用MSP430单片机,仅用一块单片机就实现了信号采集,路线判断,电机控制。该技术可以应用于无人工厂,仓库,服务机器人等领域。
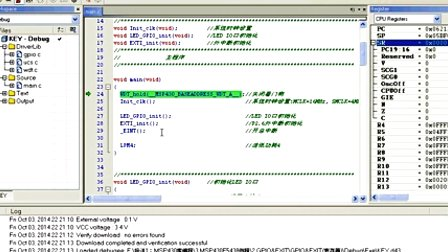
爱晶电子MSP430库函数编程3.GPIO
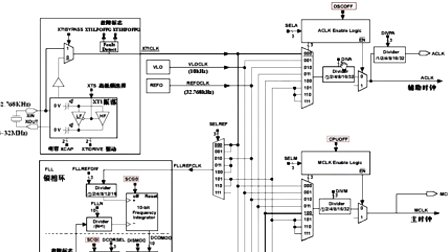
爱晶电子MSP430库函数编程2.时钟系统
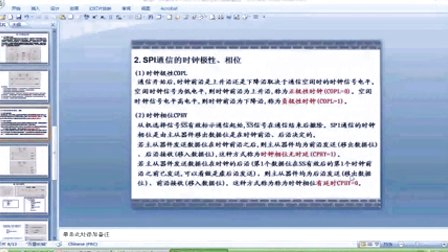
爱晶电子MSP430库函数编程5.2SPI通信
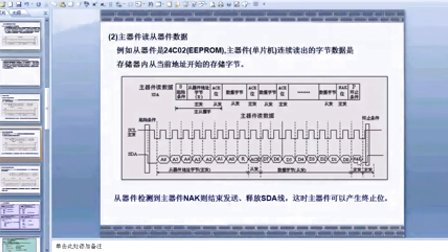
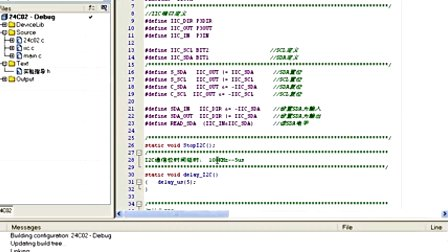
爱晶电子MSP430库函数编程6.1I2C通信与EEPROM_24C02读写
爱晶电子MSP430库函数编程6.2I2C通信
爱晶电子MSP430库函数编程5.1SPI通信与EEPROM_25C040读写
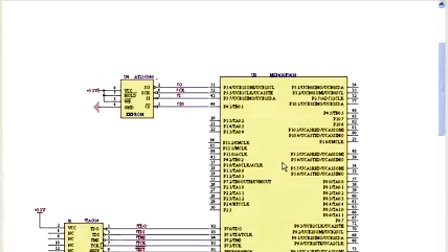
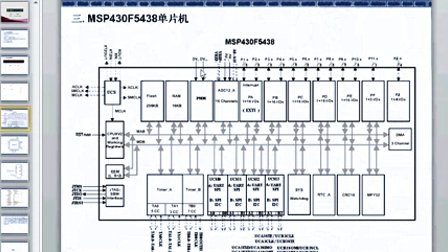
爱晶电子MSP430库函数编程1.单片机MSP430F5438
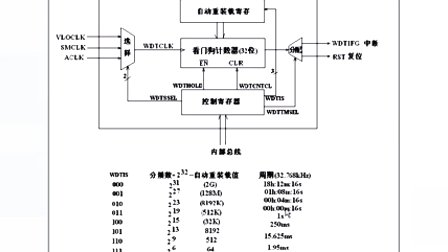
爱晶电子MSP430库函数编程9.看门狗WDT_A
x