基于DSP NNC-PID的电液位置伺服控制系统设计.pdf
时间:01-12 10:44
查看:960次
下载:162次
简介:
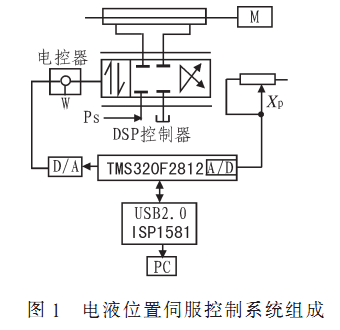
提出一种NNC-PID电液位置伺服控制系统的设计方法。采用PC机+DSP为主控制器,NNC自学习、自适应对PID参数自整定的控制算法,以满足在非线性、参数时变性、不确定性条件下,对机械手电液位置伺服系统进行高精度和快速响应的控制要求。与常规PID控制的对比实验表明,该系统由于具有自学习和实时调整PID参数的能力,使系统很快收敛于位置稳态值,同时对参数时变表现出良好的鲁棒性,很好地解决了液压系统的非线性和参数时变问题,具有良好的定位精度和伺服跟踪性能。