基于模糊优化的PID直流无刷电机控制.pdf
时间:01-12 11:27
查看:2664次
下载:162次
简介:
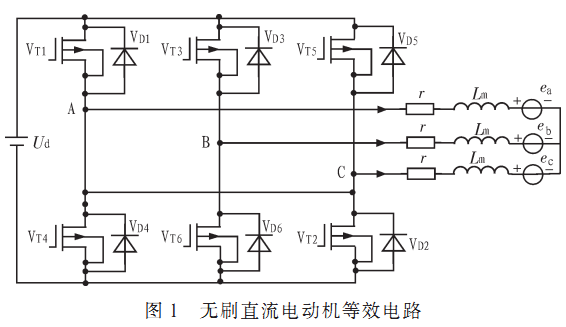
为抑制无刷直流电动机的高度非线性和大量随机扰动,根据模糊优化的PID控制方法设计多变量的无刷直流电机(BLDCM)的控制方案。该控制方案采用模糊算法在线自动整定传统的PID参数,可用来设计多自由度机器人手臂关节控制器。详细阐述系统的组成和运行模式。实验结果表明,该控制方案使系统的响应时间和以前相比缩短50%,超调量降低5%,转矩扰动减小30%,更能有效地提高系统控制的精确度、柔韧性和鲁棒性。