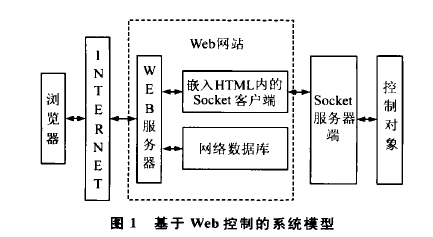
多机器人编队的远程控制会面l临协作环境不确定、信号传输延迟等困难,在Web模式下采用基于事件的远程控制策略会克服这些困难并使系统具有稳定、安全、可靠和高效率等性能.编队控制时采用“领队一跟随”的控制策略也可以使多机器人具有高度的自组织能力.3个Pioneer3机器人的三角形编队实验验证了所选用系统和控制策略的合理性和有效性.
基于ARM、GPRS和WEB的远程数据采集(效果展示一)
自制的六轴机械手视频
基于51单片机指纹密码锁毕业设计
基于Arduino与LabVIEW的温度监测系统设计
单片机音乐喷泉设计/音乐频谱彩灯设计/DIY电子制作
牛人自制空调半导体制冷空调内机
单片机课程设计proteus仿真抢答器
国外牛人做的带机枪的四轴,最后自杀摧毁目标
Cocktail
x