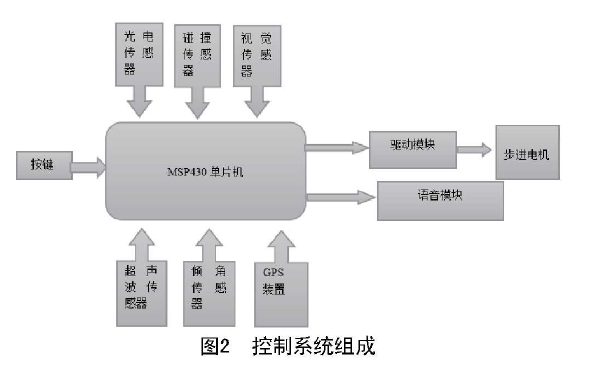
针对一种自主智能导盲机器人,基于MSP430单片机设计了其控制系统,该机器人以MSP430单片机为控制核心,具有丰富的传感器系统,包括碰撞传感器,超声波传感器,光电传感器、视觉传感器和倾角传感器,并具有GPS导航功能和语音交互功能。首先通过GPS导航功能进行线路规划,控制系统根据各传感器判断是否前进和转弯,最终实现将盲人安全准确的带到目的地。
爱晶电子MSP430库函数编程3.GPIO
爱晶电子MSP430库函数编程2.时钟系统
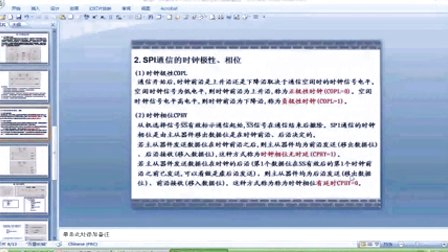
爱晶电子MSP430库函数编程5.2SPI通信
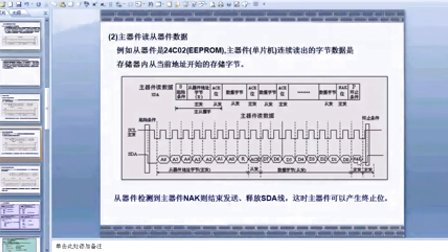
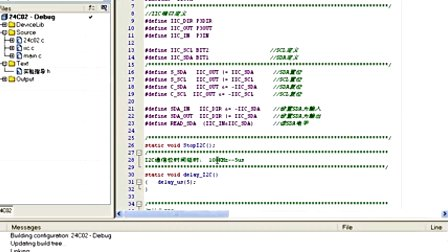
爱晶电子MSP430库函数编程6.1I2C通信与EEPROM_24C02读写
爱晶电子MSP430库函数编程6.2I2C通信
爱晶电子MSP430库函数编程5.1SPI通信与EEPROM_25C040读写
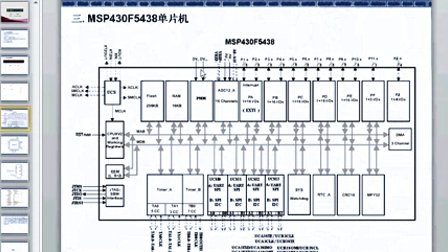
爱晶电子MSP430库函数编程1.单片机MSP430F5438
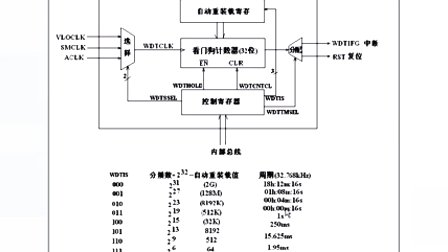
爱晶电子MSP430库函数编程9.看门狗WDT_A
Cocktail
x