足球机器人融合了计算机视觉、模式识别、决策对策、自动控制、无线通信、多智能体合作等多项技术,具有极高的研究价值。本文设计了基于ARM7微处理器的集中视觉足球机器人底层控制系统,简化了系统设计,满足微型机器人的控制需要。同时,也有利于足球机器人自主化的转型和发展。
嵌入式实时操作系统UC/OS原理与实践15个学时的实验演示2-卢有亮
嵌入式实时操作系统UC/OS原理与实践2-4OsTaskCreateExt4-卢有亮
嵌入式实时操作系统UC/OS原理与实践2-7-1任务调度OSCtxSw-卢有亮
嵌入式实时操作系统UC/OS原理与实践1-1to2介绍和概述-卢有亮
嵌入式实时操作系统UC/OS原理与实践3-2时间管理1-卢有亮
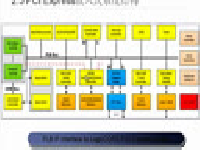
使用FPGA嵌入式系统结构快速实现PCIe系统互连
嵌入式实时操作系统UC/OS原理与实践3-1中断管理-卢有亮
嵌入式实时操作系统UC/OS原理与实践2-4OsTaskCreateExt3-卢有亮
Cocktail
x