在四旋翼无人机飞行模式分析基础上,提出了一种四旋翼无人机的稳定姿态导航控制系统,改进了无刷电机控制驱动器,并应用多任务编程方案实现软件设计。 实验表明,该机载嵌入式系统具有可靠性高、功耗低、重量轻、成本低等优点。
基于STM32F4的四旋翼实时图传系统
嵌入式实时操作系统UC/OS原理与实践15个学时的实验演示2-卢有亮
嵌入式实时操作系统UC/OS原理与实践2-4OsTaskCreateExt4-卢有亮
嵌入式实时操作系统UC/OS原理与实践2-7-1任务调度OSCtxSw-卢有亮
嵌入式实时操作系统UC/OS原理与实践1-1to2介绍和概述-卢有亮
嵌入式实时操作系统UC/OS原理与实践3-2时间管理1-卢有亮
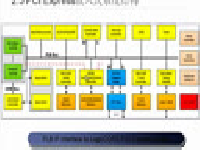
使用FPGA嵌入式系统结构快速实现PCIe系统互连
嵌入式实时操作系统UC/OS原理与实践3-1中断管理-卢有亮
x