本文设计方案以MSP430单片机为系统的控制核心,采用反射式光电传感器模块寻迹,实现智能小车的自动寻迹行驶。在实验中采用与白色相差很大的黑色引导线作为智能小车的既定路线,系统驱动采用控制方式为PWM 的直流电机。
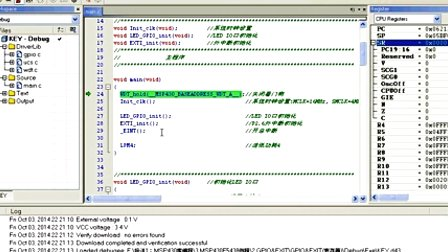
爱晶电子MSP430库函数编程3.GPIO
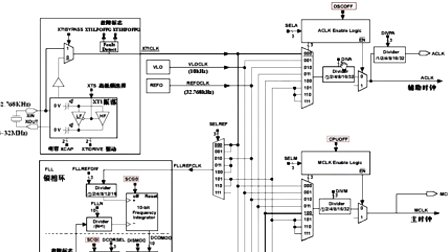
爱晶电子MSP430库函数编程2.时钟系统
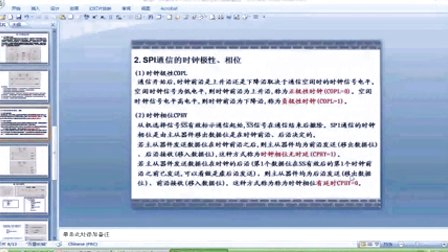
爱晶电子MSP430库函数编程5.2SPI通信
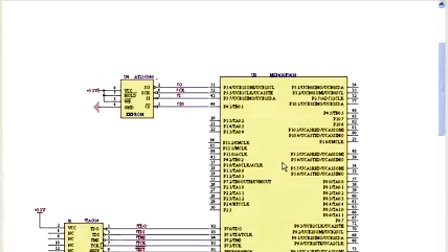
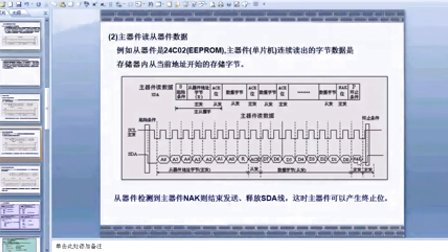
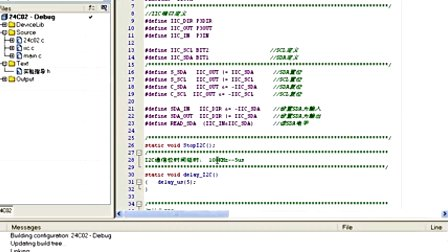
爱晶电子MSP430库函数编程6.1I2C通信与EEPROM_24C02读写
爱晶电子MSP430库函数编程6.2I2C通信
爱晶电子MSP430库函数编程5.1SPI通信与EEPROM_25C040读写
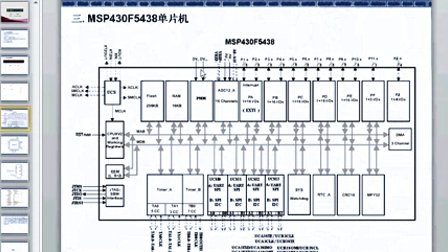
爱晶电子MSP430库函数编程1.单片机MSP430F5438
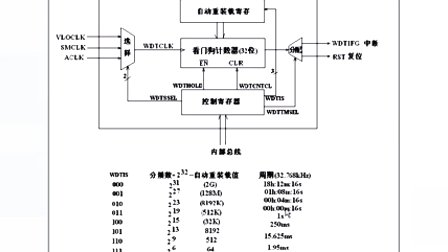
爱晶电子MSP430库函数编程9.看门狗WDT_A
x