本文主要介绍了以 MK60DN512VLL10 微控制器为核心控制单元,使用工字型电感进行路况采集,经过一系列的信号处理,通过舵机打角、双电机差速并结合编码器速度反馈控制赛车行进方向和闭环速度控制,采用干簧管对起跑线进行检测,实现停车控制。电磁智能汽车控制系统的软硬件设计及开发过程中涉及车模机械结构调整、电机驱动和放大电路的设计、路况采集和信号处理等多个方面。
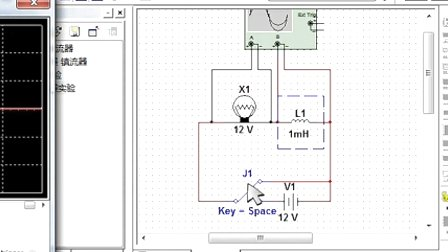
oeasy教你玩转电路-电路基础讲解—14.电感
oeasy教你玩转电路-电路基础讲解—15.电感2
西安工业大学杨聪锟电路27-电感特性,电容电感的连接
工欲善其事 2种干簧管的使用
传感器基础视频教程之频率和编码器测量
2013电子设计竞赛旋转倒立摆
数字电子技术视频教程 5 -加法器 编码器
西安工业大学杨聪锟数电23-编码器的原理与芯片介绍
Cocktail
x