文章以 M SP430 系列单片机为核心, 提 出了一种轮式移动机器人的软硬件设计方案, 阐述 了其通过传感器网络来进行避障、遍历等 自主控制,并实现机器人与 PC 机间无线控制的方法。
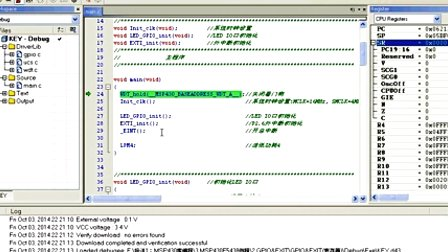
爱晶电子MSP430库函数编程3.GPIO
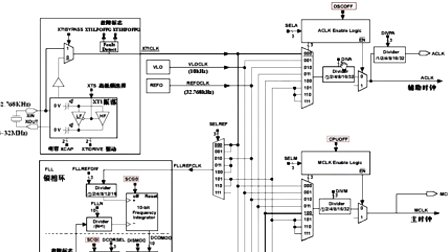
爱晶电子MSP430库函数编程2.时钟系统
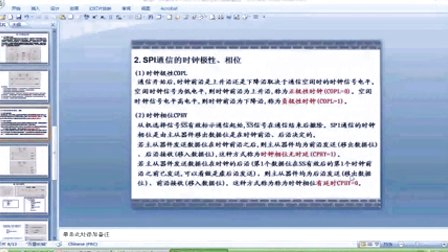
爱晶电子MSP430库函数编程5.2SPI通信
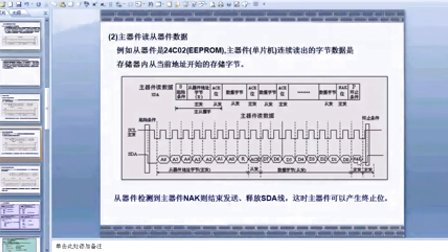
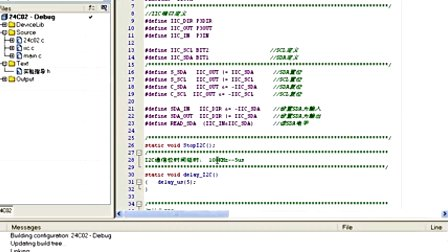
爱晶电子MSP430库函数编程6.1I2C通信与EEPROM_24C02读写
爱晶电子MSP430库函数编程6.2I2C通信
爱晶电子MSP430库函数编程5.1SPI通信与EEPROM_25C040读写
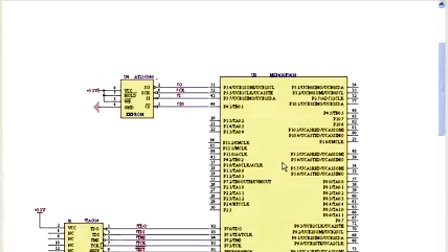
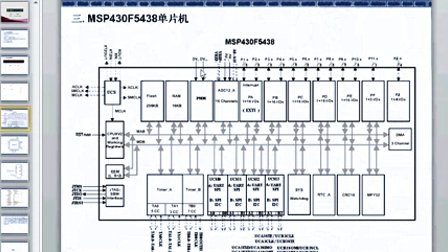
爱晶电子MSP430库函数编程1.单片机MSP430F5438
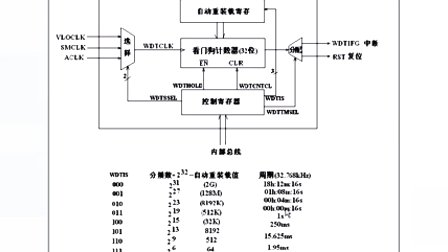
爱晶电子MSP430库函数编程9.看门狗WDT_A
x