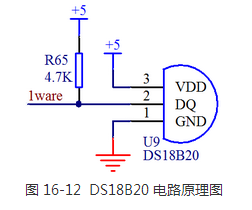
DS18B20 是美信公司的一款温度传感器,单片机可以通过 1-Wire 协议与 DS18B20 进行通信,最终将温度读出。1-Wire 总线的硬件接口很简单,只需要把 DS18B20 的数据引脚和单片机的一个 IO 口接上就可以了。硬件的简单,随之而来的,就是软件时序的复杂。1-Wire总线的时序比较复杂,很多同学在这里独立看时序图都看不明白,所以这里还要带着大家来研究 DS18B20 的时序图。我们先来看一下 DS18B20 的硬件原理图,如图 16-12 所示。
DS18B20 通过编程,可以实现最高 12 位的温度存储值,在寄存器中,以补码的格式存储,如图 16-13 所示。
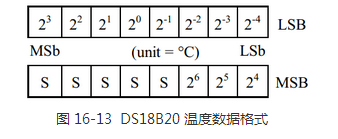
一共 2 个字节,LSB 是低字节,MSB 是高字节,其中 MSb 是字节的高位,LSb 是字节的低位。大家可以看出来,二进制数字,每一位代表的温度的含义,都表示出来了。其中 S表示的是符号位,低 11 位都是 2 的幂,用来表示最终的温度。DS18B20 的温度测量范围是从-55 度到+125 度,而温度数据的表现形式,有正负温度,寄存器中每个数字如同卡尺的刻度一样分布,如图 16-14 所示。
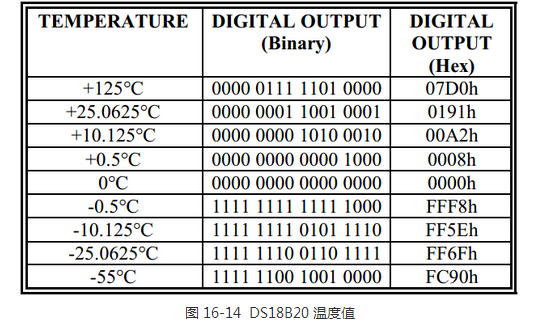
二进制数字最低位变化 1,代表温度变化 0.0625 度的映射关系。当 0 度的时候,那就是0x0000,当温度 125 度的时候,对应十六进制是 0x07D0,当温度是零下 55 度的时候,对应的数字是 0xFC90。反过来说,当数字是 0x0001 的时候,那温度就是 0.0625 度了。
首先,我先根据手册上 DS18B20 工作协议过程大概讲解一下。
1) 初始化
和 I2C 的寻址类似,1-Wire 总线开始也需要检测这条总线上是否存在 DS18B20这个器件。如果这条总线上存在 DS18B20,总线会根据时序要求返回一个低电平脉冲,如果不存在的话,也就不会返回脉冲,即总线保持为高电平,所以习惯上称之为检测存在脉冲。此外,获取存在脉冲不仅仅是检测是否存在 DS18B20,还要通过这个脉冲过程通知 DS18B20准备好,单片机要对它进行操作了,如图 16-15 所示。
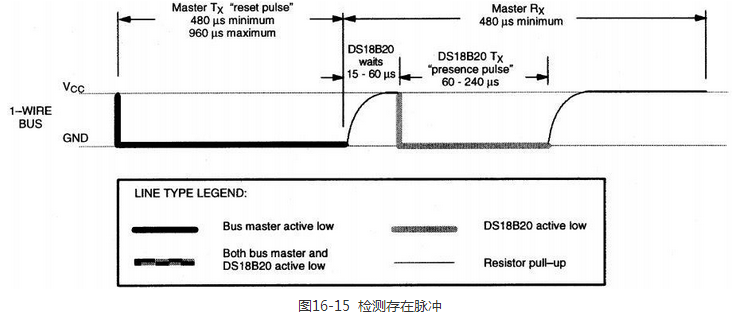
大家注意看图,实粗线是我们的单片机 IO 口拉低这个引脚,虚粗线是 DS18B20 拉低这个引脚,细线是单片机和 DS18B20 释放总线后,依靠上拉电阻的作用把 IO 口引脚拉上去。这个我们前边提到过了,51 单片机释放总线就是给高电平。
存在脉冲检测过程,首先单片机要拉低这个引脚,持续大概 480us 到 960us 之间的时间即可,我们的程序中持续了 500us。然后,单片机释放总线,就是给高电平,DS18B20 等待大概 15 到 60us 后,会主动拉低这个引脚大概是 60 到 240us,而后 DS18B20 会主动释放总线,这样 IO 口会被上拉电阻自动拉高。
有的同学还是不能够彻底理解,程序列出来逐句解释。首先,由于 DS18B20 时序要求非常严格,所以在操作时序的时候,为了防止中断干扰总线时序,先关闭总中断。然后第一步,拉低 DS18B20 这个引脚,持续 500us;第二步,延时 60us;第三步,读取存在脉冲,并且等待存在脉冲结束。
很多同学对第二步不理解,时序图上明明是 DS18B20 等待 15us 到 60us,为什么要延时60us 呢?举个例子,妈妈在做饭,告诉你大概 5 分钟到 10 分钟饭就可以吃了,那么我们什么时候去吃,能够绝对保证吃上饭呢?很明显,10 分钟以后去吃肯定可以吃上饭。同样的道理,DS18B20 等待大概是 15us 到 60us,我们要保证读到这个存在脉冲,那么 60us 以后去读肯定可以读到。当然,不能延时太久,太久,超过 75us,就可能读不到了,为什么是 75us,大家自己思考一下。
2) ROM 操作指令
我们学 I2C 总线的时候就了解到,总线上可以挂多个器件,通过不同的器件地址来访问不同的器件。同样,1-Wire 总线也可以挂多个器件,但是它只有一条线,如何区分不同的器件呢?
在每个 DS18B20 内部都有一个唯一的 64 位长的序列号,这个序列号值就存在 DS18B20内部的 ROM 中。开始的 8 位是产品类型编码(DS18B20 是 0x10),接着的 48 位是每个器件唯一的序号,最后的 8 位是 CRC 校验码。DS18B20 可以引出去很长的线,最长可以到几十米,测不同位置的温度。单片机可以通过和 DS18B20 之间的通信,获取每个传感器所采集到的温度信息,也可以同时给所有的 DS18B20 发送一些指令。这些指令相对来说比较复杂,而且应用很少,所以这里大家有兴趣的话就自己去查手册完成吧,我们这里只讲一条总线上只接一个器件的指令和程序。
Skip ROM(跳过 ROM):0xCC。当总线上只有一个器件的时候,可以跳过 ROM,不进行 ROM 检测。
3) RAM 存储器操作指令
RAM 读取指令,只讲 2 条,其它的大家有需要可以随时去查资料。
Read Scratchpad(读暂存寄存器):0xBE
这里要注意的是,DS18B20 的温度数据是 2 个字节,我们读取数据的时候,先读取到的是低字节的低位,读完了第一个字节后,再读高字节的低位,直到两个字节全部读取完毕。
Convert Temperature(启动温度转换):0x44
当我们发送一个启动温度转换的指令后,DS18B20 开始进行转换。从转换开始到获取温度,DS18B20 是需要时间的,而这个时间长短取决于 DS18B20 的精度。前边说 DS18B20 最高可以用 12 位来存储温度,但是也可以用 11 位,10 位和 9 位一共四种格式。位数越高,精度越高,9 位模式最低位变化 1 个数字温度变化 0.5 度,同时转换速度也要快一些,如图 16-16所示。
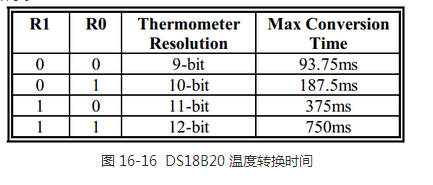
其中寄存器 R1 和 R0 决定了转换的位数,出厂默认值就 11,也就是 12 位表示温度,最大的转换时间是 750ms。当启动转换后,至少要再等 750ms 之后才能读取温度,否则读到的温度有可能是错误的值。这就是为什么很多同学读 DS18B20 的时候,第一次读出来的是 85度,这个值要么是没有启动转换,要么是启动转换了,但还没有等待一次转换彻底完成,读到的是一个错误的数据。
4) DS18B20 的位读写时序
DS18B20 的时序图不是很好理解,大家对照时序图,结合我的解释,一定要把它学明白。写时序图如图 16-17 所示。
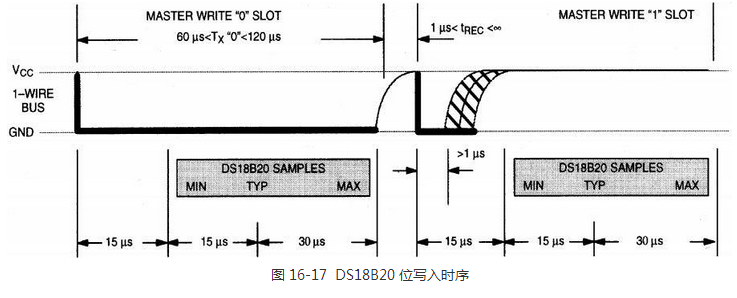
当要给 DS18B20 写入 0 的时候,单片机直接将引脚拉低,持续时间大于 60us 小于 120us就可以了。图上显示的意思是,单片机先拉低 15us 之后,DS18B20 会在从 15us 到 60us 之间的时间来读取这一位,DS18B20 最早会在 15us 的时刻读取,典型值是在 30us 的时刻读取,最多不会超过 60us,DS18B20 必然读取完毕,所以持续时间超过 60us 即可。
当要给 DS18B20 写入 1 的时候,单片机先将这个引脚拉低,拉低时间大于 1us,然后马上释放总线,即拉高引脚,并且持续时间也要大于 60us。和写 0 类似的是,DS18B20 会在15us 到 60us 之间来读取这个 1。
可以看出来,DS18B20 的时序比较严格,写的过程中最好不要有中断打断,但是在两个“位”之间的间隔,是大于 1 小于无穷的,那在这个时间段,我们是可以开中断来处理其它程序的。发送即写入一个字节的数据程序如下。
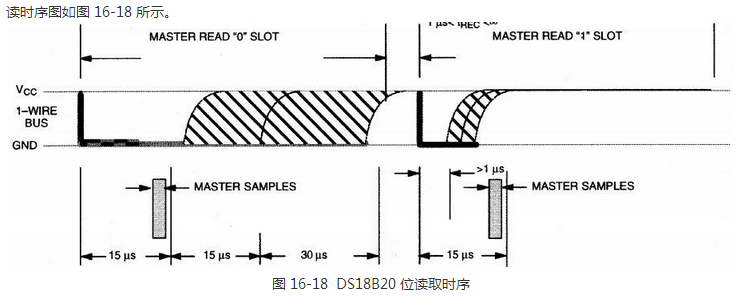
当要读取 DS18B20 的数据的时候,我们的单片机首先要拉低这个引脚,并且至少保持1us 的时间,然后释放引脚,释放完毕后要尽快读取。从拉低这个引脚到读取引脚状态,不能超过 15us。大家从图 16-18 可以看出来,主机采样时间,也就是 MASTER SAMPLES,是在 15us 之内必须完成的,读取一个字节数据的程序如下。
DS18B20 所表示的温度值中,有小数和整数两部分。常用的带小数的数据处理方法有两种,一种是定义成浮点型直接处理,第二种是定义成整型,然后把小数和整数部分分离出来,在合适的位置点上小数点即可。我们在程序中使用的是第二种方法,下面我们就写一个程序,将读到的温度值显示在 1602 液晶上,并且保留一位小数位。
/***************************Lcd1602.c 文件程序源代码*****************************/
(此处省略,可参考之前章节的代码)












