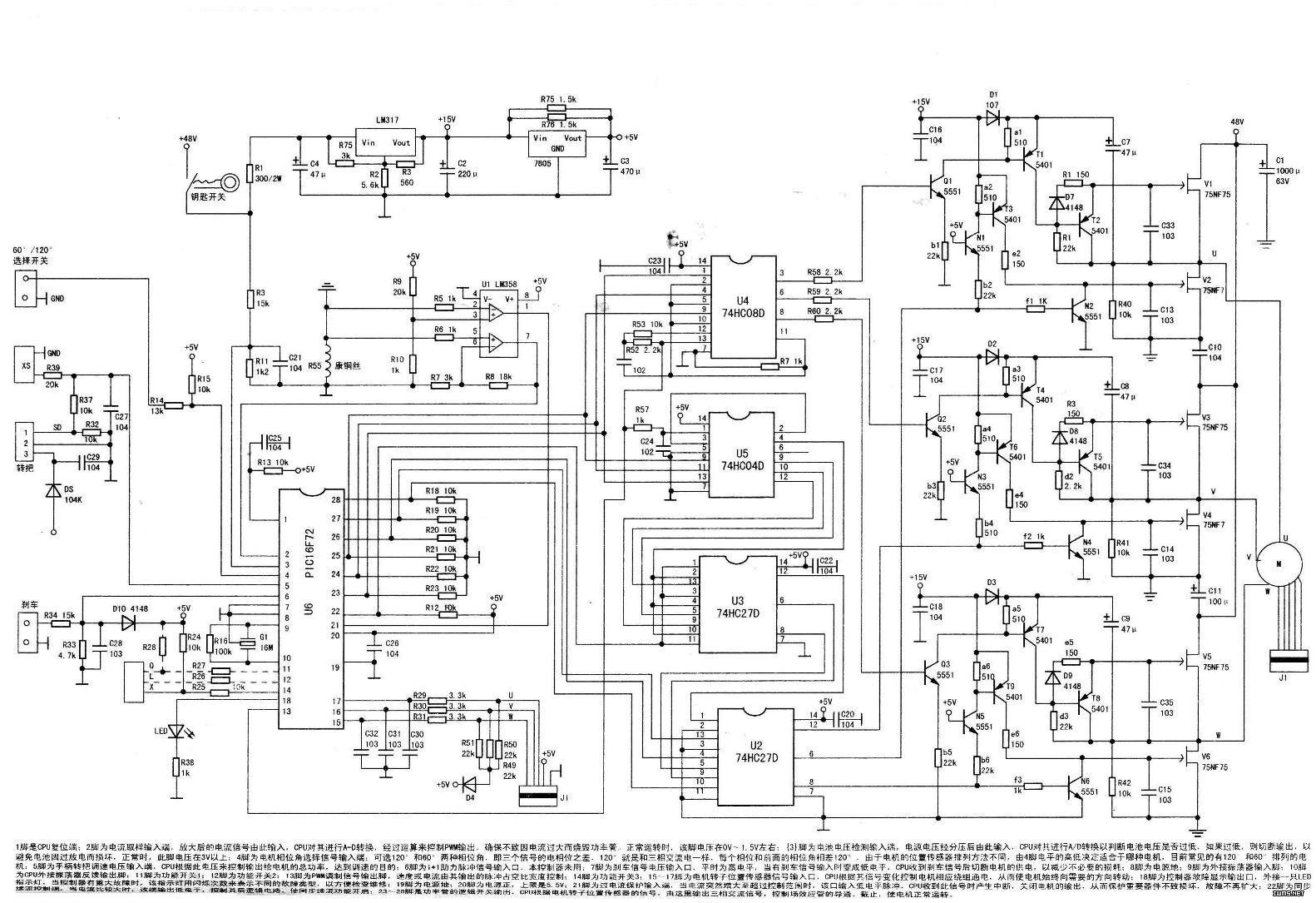
根据实物绘出其电路图,如图所示。该控制器由CPU(PIC16F72)、2片74HC27(3输入或非门)、1片74HCO4D(反相器)、1片74HCO8D(双输入与门)和1片LM358(双运放)、6只大功率场效应管等组成,功率达350W,是一款比较典型的无刷电动车控制器,具有600和120°驱动模式自动切换功能。
电路组成及工作原理
该电路分为电源电路,信号输入与预处理、智能信号处理控制,驱动控制信号功率驱动开关等三部分。CPU(PIC16F72)单片机是智能处理控制部分的核心。PIC16F72的引脚功能描述见304页图中所注。
1.电源电路
该控制器有三组电源。第一组是提供总能源的电池。板子上的电解电容C1(1OOOμF/63V)、C11(1OOμF/63V)及C1O(0.1μF/63V)用于消除由电源线、电路板走线所带来的电阻、寄生电感等引起的杂波干扰。由于是工作在大电流、高频率、高温状态下,对电解电容有损耗角小、耐高温的要求,普通的电解电容容易发热爆裂。
第二组电源提供15V电压,一是给场效应管供电,由于场效应管必须有1OV以上、20V以下的电压才能很好地导通,所以必须有合适的电压为其供电,同时15V电压也为5V稳压块提供预稳压。稳压块为LM317,输出15V。由于LM317的输入输出压差不能超过40V,而输入电压(电池电压)可能高达60V,因此在LM317前面加了一只330Ω/2W的电阻。
第三组电源是5V,稳压块采用LM78LO5,由于78LO5的最大输出电流只有1OOmA,所以并联了两只1.5kΩ的电阻R75、R76,以扩流。系统对5V电源的要求比较高,不单单是因为逻辑电路、CPU等的电源电压都不能过高,而且由于CPU的所有AD转换都是以5V电压为基准,所以若5V不准,会出现电流检测、欠电压检测、手柄控制等均不能达到设计要求的情况,甚至不能动作。因此,该电压应严格控制在4.90V~5.1OV。
2.信号输入与预处理电路
该电路包括电源电压输入、工作电流比较、放大输入、手柄转把调速电压输入、刹车信号输入、电机转子位置传感器的霍尔信号输入,以及其他功能开关信号输入等。
(1)电源电压输入由于CPU只接收0V~5V的信号,所以电源电压必须经过分压才能输入CPU。
(2)工作电流放大、输入电路康铜丝R55采样的电流信号经过R6送入运放U1A(LM358)同相输入端(5)脚,经过放大,由(7)脚输出至U6(CPU)(2)脚,CPU根据该信号的高低控制PWM脉冲输出的大小,从而控制功率管电流的高低。UIB(LM358)作为比较器,其输出端(1)脚接CPU(21)脚。电流正常时,U1B(3)脚电压高于(2)脚,(1)脚输出高电平。当电流由于某种原因突然增大到一定程度时,(2)脚电压高于(3)脚,(1)脚输出低电平,从而将U6(21)脚过流保护端电位拉低,CPU据此完全关闭电机的输出,进入保护状态,对控制器输出的最大电流进行限制,以保护电池、控制器、电机等不会出现超过允许范围的大电流,避免故障进一步扩大。
(3)手柄转把输入部分+5V电源加到手柄转把的翟尔元件上,转动手柄转把,霍尔元件产生的1.2V~4.2V转速控制电压通过R37、R32分压,C27滤波后,输入到U6(5)脚,CPU据此控制驱动PWM信号,实现电机调速。
(4)刹车信号输入经R,34、R33分压,送到刹车信号(低电平有效)CPU(7)脚。正常行驶时,U6(7)脚为高电平,(13)脚正常输出驱动脉冲;刹车时,U6(7)脚电平被拉低,(13)脚停止驱动脉冲输出,达到刹车断电功能。
(5)电机转子位置传感器输入由于该传感器安装在电机内部,采用开路输出的办法,所以除提供+5V电源外,每个传感器U、V、W都必须接上拉电阻(R49~R51),传感器U、V、W输出的信号经电阻R29~R31、电容C30~C32滤波后,送到U6(15)~(17)脚,CPU根据其信号变化让电机相应绕组通电,从而使电机始终向需要的方向转动。此外在电源处接有一只二极管D4,接地采用细铜膜做保险丝,以防止电机相线与霍尔信号线短路后高电压反窜进来,损坏板子上的其他零件。
(6)限速控制当限速开关接通时,调速信号经R33对地拉低,从而使转速不能调得太高,以达到限速目的。
(7)电池欠压检测输入电池电压经R3、R11分压,C21滤波后,加到U6(3)脚,CPU据此信号判断电池电压是否过低。当电池电压降低到控制器设定值以下时,CPU停止PWM芯片信号的输出,以保护电池不至于在低电压惰况下放电,避免电池因过放电而损坏。
3.驱动控制信号和功率驱动开关
从U6(13)脚输出的PWM占空比驱动控制信号,一路经R53、R52、C71载波(缩小占空比)后输出,相位不变,形成PWM信号,加到与门U4(74CO8D)(13)脚,与U6脚送来的相位开关信号进行逻辑合成,再以一定的逻辑顺序分别从(3)、(6)、(8)脚输出高电平加到三极管Q1~Q3基极,使之导通,驱动T1、T4、T7导通,从而使三组上桥臂场效应V1、V3、V5按一定的逻辑顺序轮流导通工作,将电源电压加至电机绕组。
另一路经R57、C24加到U5(74CO4D)(1)脚,经反相形成PWM信号,由(4)脚输出到或非门U3(74C27D)(2)、(4)、(10)脚,与U6(22)脚同步续流控制端送来的同步续流信号比较后,由(6)、(8)、(12)脚输出到或非门U2(74C27D)(1)、(9)、(10)脚,与U6(26)~(28)脚送来的相位开关信号进行合成,由或非门U2(6)、(12)、(8)脚分别输出高电平,加到三极管N2、N4、N6基极,使三极管N2、N4、N6导通,从而使三组下桥臂场效应管V2、V4、V6按一定的逻辑顺序轮流导通工作,电流通过电机绕组流回电源负极,从而得到模拟三相交流电,使电机旋转起来。
自检后的状态由LED2显示结果,进行判断。LED显示情况与控制器状态的对应关系如下:
闪1停1--自检正常通过;闪2停1--欠压:闪3停1-LM358故障;闪4停1--电机霍尔信号故障:闪5停1--下管故障;闪6停1--上管故障;闪7停1--过流保护;闪8停1--刹车保护;闪9停1--手把地线断开;闪10停1--手把信号和手把电源线短路;闪1停11--上电时手把信号未复位。
在检修时,首先要排除短路故障,特别是未级功率管。
在电门锁一侧,可以断开电门锁插接件测电流,若电流约为65mA,则说明控制器前级无短路。
当无短路而电机不转时,应先捡查初始化自检条件是否正常。
检查电机霍尔元件好坏的方法:打开电门锁,用指针式万用表交流1OV挡分别测U6(15)~(17)脚,即电机霍尔的W、V和U相的输入端,用手慢慢转动电机轮,如果表的指针在OV~4V左右波动,说明电机霍尔元件基本正常。
检查控制器前级是否正常的方法:首先控制器应能自检,观索LED2灯闪停是否正常。若LED2闪一次停一次,说明自检通过,否则应检查自裣灯指示的相关故障电路。
自检正常通过后,用万用表交流1OV挡测U6(26)~(28)脚(即下管换相信号),转动转把使电机轮尽量旋转慢一点,若表针在OV~4V左右波动,再测U6(23)~(25)脚(即上营换相信号),表针应在OV~2V左右波动。然后测U6(CPU)(13)脚(即PWM输出脚),此点电压随转把的转动而变化,若为OV~4.8V,说明U6输出基本正常。
电机电流检测和保护电路由电流取样电阻R5、6和U1等组成。当无刷电机电流增大到使U1(2)脚电压高于(3)脚约0.23V时,U1(1)脚变为低电平,U6(21)脚变为低电平,单片机进入过流保护状态。