4 子扇区过程
在2级SVPWM中,第1步是找出可确定停顿矢量的扇区编号。第2步是,计算每个所选矢量的停顿时间。根据第1章中3级SVPWM原则,当确定主扇区且所有矢量均映射到主扇区时,可使用与2级SVPWM相同的过程来确定子扇区,并计算每个停顿矢量的停顿时间。这种过程算法在许多文章中都有介绍,因此本文将不再讨论子扇区确定方法和停顿时间计算方法。
尽管我们可以通过子扇区方法找出每个矢量的停顿时间,但是每个功率开关的占空比分布比2级SVPWM要复杂得多。3级SVPWM拥有6对补偿功率开关,其意味着,当我们得到所选矢量的停顿时间时,必须计算出6个占空值。为了简化占空比计算过程,本文介绍一种有效的方法,用于轻松地计算每对功率开关的占空比。
我们同样以主扇区1作为例子。根据图4,R相位没有N状态。除此以外,如果选择OON、ONO和OOO,用于矢量映射,则S和T相位没有P状态。就R相位而言,用1代替P状态,并用0代替O状态。就S和T相位而言,用1代替O状态,用0代替N状态。结果是,与2级SVPWM相同的矢量图。图8显示了这种操作过程。

图8 状态代替
在完成2级SVPWM过程以后,可知道3个矢量的停顿。如图8所示,Tx为100停顿时间,Ty为110停顿时间,而Tz为111和000停顿时间。因此,我们可以利用中心对齐PWM输出模式,计算出3对补偿功率开关的3个占空比(d1、d2和d3);本例所得矢量序列为000→100→110→111→110→100→000。图9左边显示了2级SVPWM中3对补偿功率开关上级开关的状态,其被称作中心对齐SVPWM。

图9 2级逆变器中心对齐SVPWM
如果我们用P和N分别代替1和0,则我们可得到3级逆变器中心对齐SVPWM的右边部分。3级SVPWM的矢量序列为:
ONN→PNN→PON→POO→PON→PNN→ONN。
正功率开关对为Qx1和Qx3(x=R、S、T);负功率开关对为Qx4和Qx2(x = R、S、T)。我们对每对状态0和1的定义也与2级SVPWM相同。因此,对于主扇区1而言,在单开关周期内,负R相位对始终为0,对于S、T相位而言,正对始终为0。那么,仅3对功率开关必须通过不同的占空比、正R相位对和负S、T相位对控制,其相当于2级SVPWM的3对功率开关。这意味着,在主扇区1中,d1可分配给正R相位对,d2可分配给负S相位对,而d3可分配给负T相位对。
前面分析结果可扩展至其它矢量。表4总结了状态代替,表5列举了每个主扇区的占空比分配情况。
表4 每个主扇区的状态代替
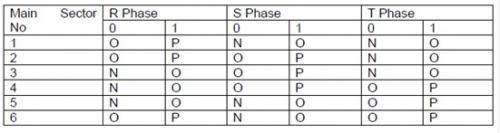
表5 每个主扇区的占空比分配

5 算法实施
由第4小节的分析,我们可实现3级SVPWM算法。图10显示了该软件流程图。

图10 3级SVPWM算法流程图
图10中,所有函数输入均为基准矢量的αβ元素。
RevParkConv为Park反向转换的函数,由此,我们可以得到3个相位静态元素。
MainSectorCal为通过表3所列结果确定主扇区编号的函数。
MapVector为映射基准矢量至所选主扇区的函数。表2列出了映射矢量αβ元素。
Svgen_dq_2_Level为实现2级SVPWM过程的函数,由此,我们可知道三个占空比d1、d2和d3。
DutyAssign为通过表5所列结果为功率开关对分配CMPR值的函数。
6 仿真结果
为了测试第5章所讨论算法的有效性,我们使用Matlab Simulink Platform得到仿真结果。所有算法均通过C代码s函数完成,其可轻松移植至现实系统。
仿真条件如下:
三相三级NPC桥
开关频率:10kHz、PWM周期计数:3000
DC侧电压:700V
基准相到相电压:(1)200 V/50 Hz;(2)280 V/50 Hz
LC滤波器参数:每个相位,L=9mH,C=4.7μf
R负载:每个相位100Ω
无停滞时间

图11仿真结果
(CH1:基准电压;CH2:输出电压;CH3:主扇区计算;CH4:子扇区计算)

图12 仿真结果
(CH1:正QR1 PWM;CH2:负QS2 PWM;CH3:负QT2 PWM;CH4:主扇区)

图13 220Vac输出CMPR值
CH1:R相位正(蓝色)和负(绿色)的CMPR值
CH2:S相位正(蓝色)和负(绿色)的CMPR值
CH3:T相位正(蓝色)和负(绿色)的CMPR值
CH4:主扇区

图14 280Vac输出CMPR值
CH1:R相位正(蓝色)和负(绿色)的CMPR值
CH2:S相位正(蓝色)和负(绿色)的CMPR值
CH3:T相位正(蓝色)和负(绿色)的CMPR值
CH4:主扇区
由图11-图14所示仿真结果,经证明,该算法是正确的。这种算法可用于实现3级3相逆变器SVPWM。但是,由于没有考虑到停滞时间和DC侧电压失衡所产生的影响,因此要求做进一步的研究。所以,我们必须特别注意这种方法的局限性。