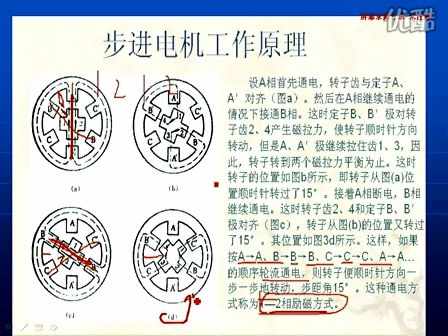
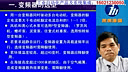
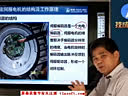
在介绍电路之前先来介绍一下步进电机的结构和工作原理。市面上一般步进电机内部结构如图1所示:

如何能使它转起来呢?一般有两种方法:
1.单相驱动:一相一相驱动。线圈加高电平顺序是:黄'蓝'红'橙;或是:橙'红'蓝'黄。其中黑白接地。
2.双相驱动:当要求电动机输出大功率时可以两相两相同时驱动。线圈加高电平顺序为:黄+红'蓝+橙;或是:橙+蓝'红+黄。
了解步进电机的驱动方式后、我想到了用移位寄存器产生移位脉冲来让步进电机动起来。电路如图2。
图2是通过拨码开关控制74LS194使Q0、Q1、Q2、Q3产生上面提过的两种移位脉冲来控制U1(光电耦合器),运用光电耦合器是为了使控制电路的电源与电机的电源隔离从而减少相互的干扰,当然也可以用可控硅来代替。R3~R6是1~10k的普通电阻,本例采用1k。其中将DSL接Q0是为了构成循环左移。同样DSR接Q3是为了构成循环右移。这样接就可以实现循环左右移从而实现正反转。
74LS194的使用如下表:
要让74LS194工作还必须有脉冲信号。CLK的脉冲信号可由时基电路555产生.电路见图3。
调节R1可改变输出脉冲的周期从而改变电动机的转速。当然这样的控制不是很精确,如果想精确调节可用单片机来控制,只要把P0、P1、P2、P3、S0、S1、MR、LCK接到单片机的IO口(如P1口)脉冲的产生用定时,这里就不做详细介绍,原理是一样的。
为了提供足够大的电流还要加一个驱动电路,如图4。
按照以上电路图连接好后就可以调试了。接上电源后用拨码开关控制电动机的运转,首选置数,比如是单相驱动可设预置数0001(即P3置0、P2置0、P1置0、P0置1),然后S1、S2同时置1,把预置数送出,接下来就可以通过改变S1、S0的状态来改变脉冲的左移右移,从而改变电动机的正反转,如10为正转则01为反转。当正反转没问题后可以通过调节图3的R1来改变电动机的转速快慢。当接不同功率的电机时可以改变+12V电源(变大或变小),不过值得注意的是电流不要超过三极管的最大工作电流,TIP127是PNP达林顿管,最大可提供5A电流。R5、R6、R7、R8是普通电阻,1-10K自行调节,本例中用了1K;R9、R10、R11、R12是大功率限流电阻,功率2-3W阻值2-22欧,本例采用了22欧;D1、D2、D3、D4为保护晶体管而设,可在断电时为感应电势提供泄放通路。本人采用以上电路自己亲手制作一遍,效果还是不错的,可以驱动不同型号不同功率的步进电机,轻轻松松实现正反转控制和速度调节。
如想精确调节转速、可用单片机来实现,只要去掉555时基振荡电路、把图1改为图5即可。
控制的原理与上面是一样的,就是提高了精度,扩大了调节范围,使用起来比较简单.此电路的编程也比较方便。这里不做详细介绍。在制作电路时可以在电路板上留出P0、P1、P2、P3、S0、S1、MR、LCK的端口这样不但可以通过开关来控制也可以方便改接单片机。