一、大致介绍:
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。

图1 常见的几种步进电机
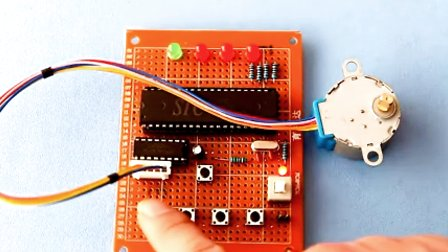
图2 步进电机和ULN2003合用
二、常用术语
1、相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
2、拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
3、步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
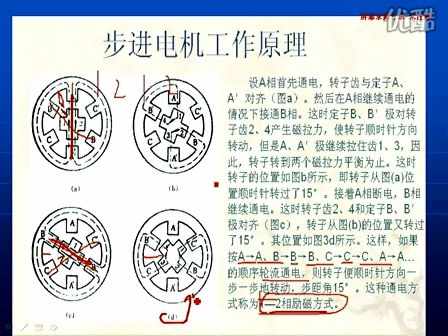
图3 步进电机内部模型图
三、驱动方式
1、1相励磁法:每一瞬间只有一个线圈相通,其它休息。(优点)简单,耗电低,精确性良好。(缺点)力矩小,振动大,每次励磁信号走的角度都是标称角度。
2、2相励磁法:每一瞬间有两个线圈导通。(优点)力矩大,震动小。(缺点)每励磁信号走的角度都是标称角度。
3、1-2相励磁法:1相和2相交替导通。(优点)精度较高,运转平滑,每送一个励磁信号转动1/2标称角度,称为半步驱动。(前两种称为4相4拍,这一种称为4相8拍)
(a)1相励磁法 (b)2相励磁法 (c)1-2相励磁法
图4 3种驱动方式
三、代码
1 /*-----------------------------------------------
2 名称:步进电机
3 论坛:www.doflye.net
4 编写:shifang
5 日期:2009.5
6 修改:无
7 内容:本程序用于测试4相步进电机常规驱动 使用1相励磁
8 ------------------------------------------------*/
9 #include
10
11 sbit A1=P1^0; //定义步进电机连接端口
12 sbit B1=P1^1;
13 sbit C1=P1^2;
14 sbit D1=P1^3;
15
16 #define Coil_A1 {A1=1;B1=0;C1=0;D1=0;}//A相通电,其他相断电
17 #define Coil_B1 {A1=0;B1=1;C1=0;D1=0;}//B相通电,其他相断电
18 #define Coil_C1 {A1=0;B1=0;C1=1;D1=0;}//C相通电,其他相断电
19 #define Coil_D1 {A1=0;B1=0;C1=0;D1=1;}//D相通电,其他相断电
20 #define Coil_OFF {A1=0;B1=0;C1=0;D1=0;}//全部断电
21
22 unsigned char Speed;
23 /*------------------------------------------------
24 uS延时函数,含有输入参数 unsigned char t,无返回值
25 unsigned char 是定义无符号字符变量,其值的范围是
26 0~255 这里使用晶振12M,精确延时请使用汇编,大致延时
27 长度如下 T=tx2+5 uS
28 ------------------------------------------------*/
29 void DelayUs2x(unsigned char t)
30 {
31 while(--t);
32 }
33 /*------------------------------------------------
34 mS延时函数,含有输入参数 unsigned char t,无返回值
35 unsigned char 是定义无符号字符变量,其值的范围是
36 0~255 这里使用晶振12M,精确延时请使用汇编
37 ------------------------------------------------*/
38 void DelayMs(unsigned char t)
39 {
40 while(t--)
41 {
42 //大致延时1mS
43 DelayUs2x(245);
44 DelayUs2x(245);
45 }
46 }
47 /*------------------------------------------------
48 主函数
49 ------------------------------------------------*/
50 main()
51 {
52 Speed=5; //调整速度
53 while(1)
54 {
55 Coil_A1 //遇到Coil_A1 用{A1=1;B1=0;C1=0;D1=0;}代替
56 DelayMs(Speed); //改变这个参数可以调整电机转速 ,
57 //数字越小,转速越大,力矩越小
58 Coil_B1
59 DelayMs(Speed);
60 Coil_C1
61 DelayMs(Speed);
62 Coil_D1
63 DelayMs(Speed);
64 }
65 }