近些年来, 由于步进电机具有精度高、惯性小、工作可靠、能实现高精度快速开环控制的特点, 被广泛应用在各种不同的运动控制系统中。其中, 步进电机常用的应用场合就是快速精确定位系统。在实际应用过程中, 若步进电机在升降速过程中, 脉冲频率的变化不合理, 就会使电机失步或者过冲, 以致系统无法做到精确定位; 同时, 由于系统快速性的要求, 电机需要很快地完成加减速过程[12],所以必须提供合理的加减速运行曲线,在保持定位精度的前提下, 提高系统的运行速度。因此有必要了解步进电机加减速的运行规律, 对脉冲频率进行合理性研究, 找出最佳脉冲输出方案, 使步进电机在运行过程中能达到快速定位、运行步数准确的目的。
目前国内外步进电机加减速控制方法主要包括以下3种:直线型加减速速度曲线、指数型加减速曲线和S型加减速曲线。本文将主要分析快速性最好的指数型加减速曲线在光电跟踪系统中的应用规律[23]。
1 指数型加减速曲线
1.1 最佳加减速的理论曲线
实际的矩频特性曲线近似为递减的,如图1所示。
由矩频特性得:

其中,Te为步进电机电磁转矩,Ts为步进电机启动转矩,fc为步进电机最高运行频率,Tc为与fc对应的转矩。
将式(1)代入步进电机运动方程:
由式(4)可知,若将加减速频率按式(4)的指数规律变化可接近最佳频率,则步进电机可采用图2所示曲线运行。
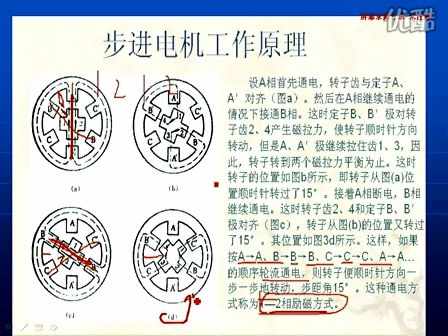
步进电机要在较高的频率上运转,必须先由低速启动,逐渐加速至高速,如果加速过程过快,就会产生“丢步”;同理,步进电机由高速转为低速,必须经过减速过程,如果减速过程过快,就会产生“超步”。所以步进电机的加减速曲线控制规律的确定很关键,其主要根据步进电机的距频特性(图1)和试验测试确定。
在图2中步进电机由fs启动频率开始启动,经过加速曲线加速在fr处到达高速的恒定速度。在从fr减速的时候,步进电机脉冲输出频率较高,距频特性值比较小,也就是步进电机的力矩很小(图1中步进电机距频特性随着运行频率的增大急剧减小)。在高速的时候频率大力矩小,低速的时候频率小力矩大。所以减速曲线必然是高速缓慢减速,低速迅速减小过程。符合图2的减速曲线的趋势,经过验证,只是减速过程比加速过程要快一些。
图1 矩频特性曲线 图2 指数运行曲线
此方法符合系统固有规律, 升降速过程快速而平稳。实际系统中,若能够求出每个电机的机电时间常数τm,利用式(4)就可以计算出电机加减速时每步的脉冲周期,从而在控制器中制作加减速脉冲周期表。但实际系统中,τm是很难求出的。
步进电机升速过程由突跳频率和升速曲线构成。由于升速过程中输出力矩明显减小,突跳频率不可过高,一般只有几kHz。如果突跳频率过高,会导致电机无法启动、输出力矩过小等问题;升速曲线设计不合理,也会造成同样的结果。理想的升速指数曲线无法通过程序编制实现,一般通过各种方法拟合升速曲线。
指数曲线的拟合一般采用台阶拟合、直线拟合、查表法拟合的方法。本文从理论和实践结合的角度,对3种方法进行了同一实验平台上的测试工作,并且对查表法拟合进行了低速直线拟合、高速采用多段直线逼近指数曲线查表拟合的改进。
2 光电跟踪系统中对算法的改进和实现
2.1 光电跟踪系统的组成
光电跟踪系统由支架、转盘、目标源、目标强度控制器、控制台组成。此系统是验证算法的实验平台,在实验室搭建。加减速算法的时间参数由秒表测得;脉冲的精确度参数由示波器和秒表测转盘的时间计算得到,组成示意图如图3所示。
图3 光电跟踪系统的组成
图4 光电跟踪系统硬件构成
2.2 光电跟踪系统的工作原理
在系统上电后,进入测试系统或校正系统选择菜单。选定工作方式后从键盘上输入速度、半径、距离等参数。单片机C8051F005为系统的控制核心,接收键盘上的数据并进行处理,控制电机的加减速和转动。在电机达到设定的速度后,把水平、垂直方向的最大速度和最大加速度,以及被测目标的最大角速度和最大角加速度送到LCD上显示。光电跟踪系统的硬件构成如图4所示。
2.3 加减速曲线在系统中的实现
(1) 可行性分析电机转矩的大小关系到从静止加速到最大转速所用时间的长短,转盘质量和转动惯量是由solidwork计算得到的,因此是比较准确可信的。电机从0 rad/s(静止)加速到4π rad/s(720°/s),角加速度ε=dωdt。转盘半径r,转盘质量m;转盘转动惯量I1,转盘需要的最大转矩T1=I1ε;4个标尺延长铝槽的质量m2,所需转矩T2=I2ε。
由于所选电机和减速器轴径较小,其转动惯量和需要的转矩可以忽略不计,故总的最大转矩T=T1+T2。行星齿轮减速比为8∶1,考虑到摩擦转矩、计算误差以及所忽略的电机和减速器加速所需要的转矩等,实际所选电机的转矩应留有一定的裕量(裕量按转矩的20%计算)。以上的计算是基于匀加速的情况。实际上,根据步进电机的矩频特性,其转矩随转速是下降的,因此实际选择时,步进电机的转矩还需要进一步加大,可考虑加倍。只要步进电机的加减速曲线合理,快速精确达到4π rad/s是没有问题的。
(2) 指数曲线拟合的方法及实现
首先确定光电跟踪系统步进电机的启动频率,可通过参考空载启动频率和实验得到。各种拟合方法的步进频率大小和曲线的分段确定,根据理论值和实验共同确定。
指数曲线拟合的方法中,台阶拟合方法比较粗糙,且效率低,需要比较长的时间才能达到较高的频率,并且负载力矩较小,不适合升降速比较频繁且工作频率较高的步进电机。直线拟合在程序设计上相对复杂一些,但拟合精确、效率高,且负载力矩较大,可以在短时间内升速到很高的频率[3]。查表法利用多条直线对升速曲线进行精确拟合,如图5所示。在使用步进电机时,根据不同的工作条件由程序或者硬件控制来选择使用不同的升速曲线。这种方法能够精确地拟合步进电机的升速曲线,最大程度地发挥步进电机的性能。
系统采用查表法进行指数加减速曲线的拟合,并对查表法的加减速曲线进行了改进,如图6所示。
整个曲线分为两大部分: 在低速的时候,步进电机力
图5 查表法编制升速曲线 图6 改进后查表拟合曲线
矩较大采用直线拟合加减速,可以得到很高的精度、较快的速度、简单的程序设计和良好的通用性,同时也避免了大量数据的测量;在高速的时候,步进电机的转矩很小,如果步进频率不合理,将会导致电机失步或者停止,所以在此段采用细化的直线分段法来拟合理论上的指数曲线,使其更接近电机的理论运行曲线,从而得到快速的加减速和较高的精度。
拟合曲线的实现通过控制C8051F005产生的脉冲频率的不断变化来实现,脉冲产生的精度由定时器控制,那么决定定时精度的主要因素包括:系统时钟、中断响应时间、定时时钟频率、定时常数。
本系统采用低功耗、25 MHz高速晶振工作的微控制器C8051F005,解决中断响应时间对定时精度的影响问题,通过计算中断响应时间对定时器的时间常数进行补偿。高速计数频率可以提高定时器的定时精度,但是相同时间大小的定时,计数频率越高定时常数就越大。同一时钟在较大的频率输出时,定时常数相对于低时钟的定时常数要大,定时精度高,变化一个定时常数的时候,频率增量相对较小,这样在定时常数大时有利于步进电机的加减速控制;但是在低速段,定时器的定时常数超过16位定时器的时间常数为65 535,对此采用对定时器的计数时钟频率进行切换。在高速频率段,采用系统时钟定时;在低频直线拟合段,采用系统时钟的12分频定时,减小定时常数。从而把整个指数曲线统一到16位定期器的定时范围之内,避免了扩展定时器的麻烦。该方法合理地利用了微控制器的硬件资源,也有利于软件编程;同时也充分利用了步进电机的距频特性,保证了定时精度和步进电机不失步的快速加减速性能。
3 实验结果比较和分析
构成实验平台的主要器件有步进电机BYG系列90BYG3502,步进电机驱动器MSa3H090M,Neugart减速器PLE80/90(减速比为8∶1),Cygnal公司(已由Silicon Labs公司并购)的F系列单片机C8051F005,LCD(汉字库的点阵式液晶显示器,128×64),PS/2键盘。
经过实验得到台阶拟合、直线拟合、改进的查表拟合的性能参数,如表1所列。
经过实验得到: 3种拟合方法在转盘加速到360(°)/s
表1 三种拟合方法的性能参数比较
(低速加速时间)的时候需要的时间相差不大(相对查表法拟合时间最短,8.34 s)。在向更高的转速加速的时候,在步进电机不失步高精度运转的情况下,台阶拟合达到的最高转速最低,仅可到480(°)/s,而查表拟合的方法可以达到800(°)/s,同时控制精度误差只有0.5%。因此实验证明,经过改进后的查表拟合的指数加减曲线具有快速的加减速、很高的精度以及更重负载下的控制能力。
结语
指数加减速曲线的拟合是步进电机加减控制的核心。本文在分析步进电机加减速控制规律、实际系统需求和高性能的微控制器的硬件资源的基础上,结合步进电机的矩频特性,合理利用指数曲线拟合的各种方法的优点,提出了改进的查表拟合指数曲线的方法。实验证明,该方法具有加减速时间短、误差小、精度高的特点,适合快速高精度控制系统。在步进电机加减速控制方面,具有重要的理论意义和较高的工程应用的参考价值。