0 引言
Internet的快速发展和成功促进了以太网(Ethernet)技术的发展和应用的扩展,所涉及的领域十分广泛,如传统的工业控制、信息家电、智能家居、安全监控、楼宇自动化、医疗、环境监测等。大多数的数据采集设备的通信接口符合UART 通信标准。这种通信方式的数据传输半径十分有限,并不能满足远距离传输的需求,并且不能接入Internet.因此数据的交互接入Internet 就显得非常重要了。
1 系统的总体方案及各主要模块设计
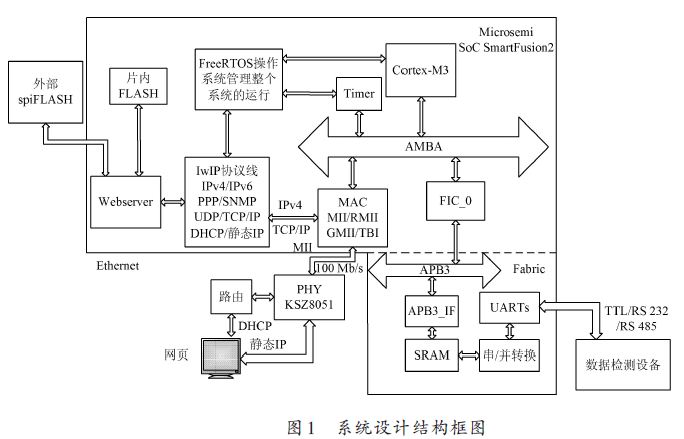
系统以Microsemi(Actel)公司的基于FLASH 架构的SoC FPGA 产品SmartFusion2器件为核心[1].系统通过Fabric架构实现多路UART对外相应数据进行采集,进行并/串转换写入Fabric 的双端口RAM.SmartFu-
sion2的ARM Cortex-M3子系统经过AHB/APB总线矩阵以AHB/APB 方式访问Fabric 的RAM,将得到的数据经过Ethernet以网页的形式在PC上显示。反之,以同样的路径将主控的指令传输到外部的终端设备。PC机端以网页形式实现数据交互。网页存放于SmartFusion2 内部FLASH,内核Cortex-M3 基于实时操作系统(FreeR-
TOS)管理任务,IP 采用静态方式,内核Cortex-M3 与Fabric采用AHB方式通信[2-3].系统设计结构框图如图1所示。
系统硬件的设计可分为三个主要模块,分别为PHY 物理层模块,SoC 的Cortex-M3 内核及FPGA 系统,UART模块的数据采集系统。
1.1 PHY模块
PHY 即物理层(Physical Layer)。物理层协议可定义电气信号标准、连线的状态、时钟信号的要求、数据编码的格式和数据传输所用的连接器等。物理层通过一个定义好的接口与数据链路层进行通信。比如MAC 可以利用标准的介质无关性接口( MII接口)与PHY进行数据交换通信。PHY还有个重要的功能就是实现以太网的CSMA/CD 部分功能,这是硬件上实现的。它可以检测到网络链路上是否有数据正在传送,如果有数据在传送中则进行等待,当检测到网络空闲,就再等待一定的时间(不同的PHY会有不同)后对数据进行传送。倘若两块网卡碰巧是同时发送数据,这将造成冲突,这时PHY 内部的冲突检测结构可以检测到冲突的发生,然后两边各自等待一定的时间进行重发数据。
PHY 的电路图连接图如图2 所示。KSZ8051 采用MII与SmartFusion2相连,由于MII兼容RMII接口,因此程序也可配置为RMII模式。Management采用2个引脚连接,分别为MDC 和MDIO,MII 的时钟由PHYKSZ8051 提供,KSZ8051 的时钟来自外部25 MHz 晶振。媒体连接采用RJ 45,兼容10 Mb/s和100 Mb/s.

1.2 SoC中的Cortex-M3模块
系统使用Cortex-M3 中的MAC 模块,如图3 所示。
通过AHB控制Ethernet MAC模块,对于MAC的配置是使用其内部的寄存器,可以配置不同的接口模式,不同的速度。本系统配置为MII接口,100 Mb/s速度。
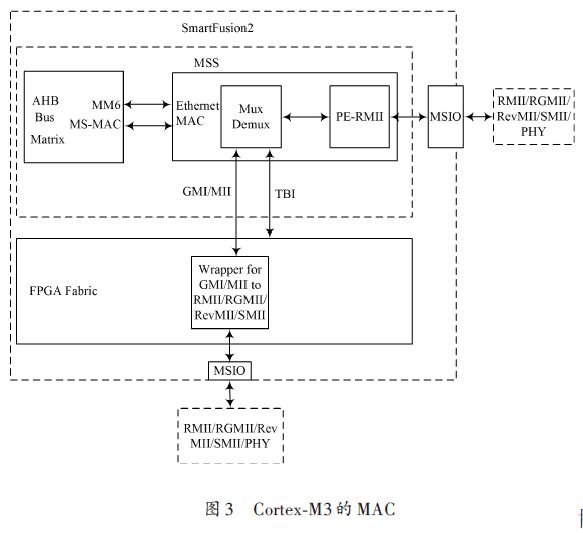
MAC(Media Access Control,媒体访问控制子层协议),主要负责控制和连接物理层。在发送数据的时候,MAC 协议可以事先判断现在是否可以发送数据,如果可以发送则将给数据加上一些控制信息,最终将数据及附带的控制信息以规定的格式发送到物理层;在接收数据的时候,MAC 协议首先判断输入的信息是否发生传输错误,如果没有错误,则去掉控制信息发送至逻辑链路层(LLC)层。以太网MAC 协议由IEEE 802.3以太网标准定义。
PHY 与MAC 的接口方式有多种,如:
MII,RMII,SMII,SSMII,GMII,SGMII,TBI等。目前常见的PHY都提供标准的MII接口,RMII信号是对PHY内部的MII的信号进行编码和解码,这就是说支持MII接口的PHY 内部都含有RMII 信号,也就是支持RMII接口。具体使用何种接口的PHY则必须根据MAC 芯片对应的功能和接口的标准来决定。
采用FreeRTOS 实时操作系统管理整个系统的运行。FreeRTOS使用Cortex-M3内核的定时器以10 ms时间片进行任务的调度和切换。创建WebServer进程和网页进行通信,网页编辑语言HTML 是不需要编译的,因此将需要显示的数据全部发送给网页。这些数据存储在FLASH中,目前测试是存储在片内FLASH,网页发来的控制数据进行实时的处理。网页的数据需要用LwIP协议栈进行打包,LwIP 协议栈是把所有的协议封装到一个单一的过程(进程)中,从而与操作系统内核分开。应用程序可能也驻留在LwIP 处理过程中,或者在单独的过程中。TCP/IP栈和应用程序之间的通信可以通过函数调用实现,也可以通过更为抽象的API[4-5].本设计的应用层使用常用的IPv4 协议,DHCP和静态IP 都进行测试,传输层和网络层使用TCP/IP.
打包之后的需要介质层MAC 进行处理,此MAC 为Cor-
tex-M3 内核自带的,支持多种MAC 接口,本设计采用MII接口,所采用的PHY芯片也是MII接口,采用Micrel公司的KSZ8051,支持MII、RMII 接口,10 Mb/s 和100Mb/s传输速度,设计时采用100 Mb/s传输。
网页的数据需要实时更新,设计网页每隔500 ms发一次更新的命令,Cortex- M3再将更新的数据发送给网页。而这些数据来自APB3上,Cortex-M3通过FIC_0和APB3 进行双向通信,从而发送和接收数据。FPGA中Fabric 和APB3 进行双向通信,数据存储在双端口SRAM 中,多路UART 和SRAM 进行双向通信。SRAM在系统起缓存的作用,用来解决两端读写速度的不同。
而对于UART的数据也定义了协议,这些协议是区分数据的格式和内容。对于UART的个数可以进行增加,系统UART的同步使用FPGA硬件实现,不受个数的限制。
1.3 FPGA的UART模块
本系统的主要功能是UART数据的采集与交互,使用网页进行人机交换,实现数据的实时更新和控制,并且把采样点的采样时间也传输过去,使用户知道数据的具体时间,便于以后的查看。
在本设计中需要在SmartFusion2片内的FPGA部分设计多路串口数据采集与存储的控制器,实现对终端的多路串口数据进行采集。使用的多路串口数据采集方法是在SmartFusion2片内的FPGA中设计一个UART控制器去采集多路数据[6].控制器并不完成串转并控制,而是实时监测多路串口数据状态,并将多路串行数据实时切换送入RAM控制器,串行的数据经过RAM控制器串行的进入RAM中去。如图4所示。
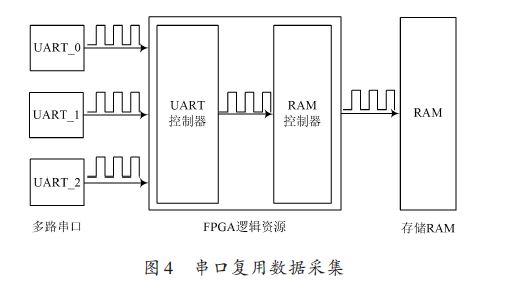
当多路串口中任何一路,任何时候到来数据的时候,UART 控制器都能感知这次串行数据,并开通相应的信道,将某一路的串口数据送到RAM 控制器。然后RAM 控制器将该信道的串行数据写入RAM 中。这样就可以完成对多路串口数据的采集工作。
在该方案中,需要在SmartFusion2 片上的FPGA 内设计一个UART控制器作为查询机制中的主机,各个终端串口作为从机,提供串口数据。主机会定时的在SEL总线上发出从机的片选信号,用于选通从机设备。当从机被选中之后,从机自己会做出判断,如果该从机有数据需要发送,则该从机立刻将串行的数据发出。如果从机没有数据需要发送,则从机对该选择信号SEL不做任何反应,定时时间到,主机会自动的去选通下一路从机,从机工作原理与之类似。这样的做法同样可以完成对多路串口数据的采集工作。
2 系统软件设计
本设计采用FreeRTOS操作系统,通过创建Web-
Server进程实现数据的交互。在初始化完成后,执行WebServer进程,WebServer进程发送网页的数据、更新网页的数据、得到采集的数据。而关于以太网的协议则使用LwIP协议栈实现。对于硬件层则使用Cor-
tex-M3内部的MAC和外部的PHY进行传输。实现物理层的传输[7].因此本设计的思路是发送接收数据给网页和接收发送APB3上对应的地址的数据。将UART的数据格式和网页HTTP数据格式互换。
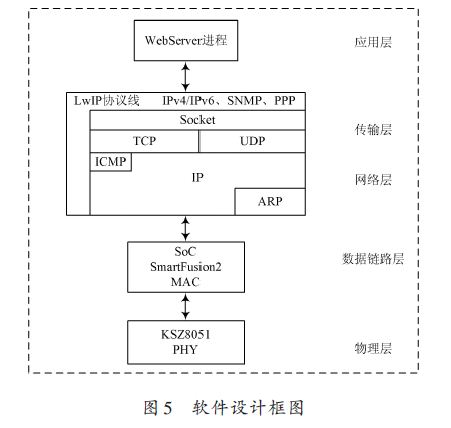
软件设计框图如图5 所示,WebServer 进程和网页进行通信,通信的协议采用LwIP 协议,对于LwIP 协议使用其中的IPv4应用层,使用TCP/IP 传输,DHCP 动态获取IP,数据链路层使用内部的MAC,采用100 Mb/s的MII接口和PHY通信,PHY在物理层上和PC机通信[8].
采用自动连接的方式与以太网相连,对于HTTP数据采用监听的方式,有HTTP 数据则执行相应的操作。在网页上显示实时的日期和时间,这个日期和时间不是来自PC机的,而是来自SmartFusion2的,能够达到显示数据的采样时间,方便用户查看和保存带有时间的数据。
以太网的初始化首先是MAC的初始化,将MAC初始化为MII接口,半字节,100 Mb/s模式。MAC 初始化后就是对于协议的选择,本系统选择TCP/IP协议,通过tcpip_input调用初始化网络的配置。对于网络的配置,首先是MAC地址、IP地址、网关、子网掩码的配置(如果为DHCP则只有MAC地址有效),可以配置为静态IP和DHCP 两种模式。静态IP 使用netif_set_up函数,DHCP使用dhcp_star函数来开始。
WebServer是系统的主任务,负责网页和APB3上数据的交互。首先是使用netconn_bind 函数新建一个80端口(HTTP)的网络,建立好后就一直处于监听状态的netconn_listen函数。
有网络连接时则发送相应的数据。如果有网页打开数据的请求,则开始发送网页的数据头和主界面的数据,同时将网页的运行的程序也发送过去,这样内核就可以方便和网页进行通信。
对于网页的刷新和数据请求命令都是已经发送给网页了,如果有网页的刷新请求则将更新的检测数据和日期时间数据发送给网页。有点击控制命令,处理器则马上响应,将控制命令转换并发送给APB3,也就发送给了UART.当然,这里面所有的数据都是加了相应的通信协议。
如发送数据给网页时则需要使用netconn_write 函数,首先是网页数据头,然后是相应的数据。如果无网络连接、无网页请求、请求完成等都是使用net-
conn_close 函数关闭网络,使用netbuf_delete 函数删除网络,然后又去监听是否有新的网络存在并连接。
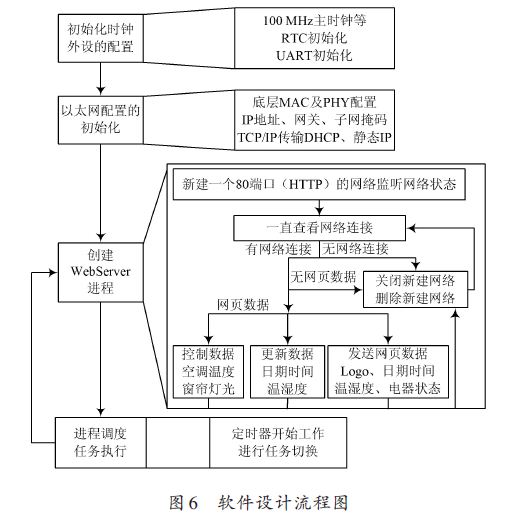
以智能家居数据采集与交互为例,系统软件设置流程图如图6所示,首先是时钟和外设的初始化,再是以太网相关的初始化,包括MAC和PHY的初始化,IP的获取方式,设置MAC 地址、IP地址、子网掩码、网关,设置传输的协议等。硬件层、传输层设置以后就是应用层,创建WebServer 应用程序。此应用程序也是主应用程序,在FreeRTOS中的优先级是最高的,堆栈大小也是最大的。WebServer任务就是与网页通信,实现网页的刷新。任务的调度和切换时通过定时器实现,10 ms为一个时间片,调度函数为vTaskStartScheduler函数实现。
3 结语
本文利用源代码开放的TCP/IP协议栈LwIP和简单实用的操作系统FreeRTOS软件平台和SmartFusion2的硬件平台构建了基于SoC的数据采集与交互系统,完成设备数据信息的采集及处理并实现远程数据交流与共享。通过实际运行测试,系统性能稳定可靠,具有一定推广使用价值。