拿到开发板有一段时间,看了下资料,使用mbed平台那简直是太简单了,但mbed封装的太严实,实在是不利于我们了解MCU内部运作机理,所以还是要使用ST的库(直接寄存器操作就免了,我不想回到石器时代),现在ST库除了F1系列已经改变,采用新的HAL Drivers的方式,这种方式更友好,更符合软件工程。使用STM32CubeMX把和MCU相关的代码已经生成的90%了,剩下和10%需要自己来完成,所有的中断基本上采用“伪回调”的方式,使用用户更专注于业务算法本身。废话不多说了,直接上代码:
-------------------------------------------------------------------------------传说中的分界线----------------------------------------------------------------------------
main.c
#include "stm32l0xx_hal.h"
#include "dma.h"
#include "i2c.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
#include "mpu6050.h"
#include "visualscope.h"
#include <string.h>
#include <math.h>
/* Private variables ---------------------------------------------------------*/
#define RXSIZE 8
#define TXSIZE 8
uint8_t rxBuffer[RXSIZE];
uint8_t txBuffer[TXSIZE];
float Angle_accel = 0;
float Angle_gyro = 0;
float Angle_comp = 0;
uint8_t outAngleData[10];
/* USER CODE BEGIN 0 */
/*---------------------------------------------------------------------------------------------------------*/
/*重力加速度算出的角度 */
/*---------------------------------------------------------------------------------------------------------*/
int32_t Calc_AngleAccel()
{
int32_t value = 0;
value = GetAccelValue('x');
if(value > 16384)
Angle_accel = -(asin(1) * 180 / 3.1415296);
else
Angle_accel = -(asin(value * 1.0 / 16384) * 180 / 3.1415296);
return value;
}
/*---------------------------------------------------------------------------------------------------------*/
/* 角速度算出来的角度(积分) */
/*---------------------------------------------------------------------------------------------------------*/
int32_t Calc_AngleGyro()
{
int32_t value = 0;
value = GetGyroValue('y');
Angle_gyro += (value / 16.384 * 0.01);
return value;
}
/*---------------------------------------------------------------------------------------------------------*/
/* 互补滤波求角度 */
/*---------------------------------------------------------------------------------------------------------*/
float ComplementFilter(int32_t simpleGyro)
{
Angle_comp = 0.98 * (Angle_comp + -simpleGyro / 16.384 * 0.01) + 0.02 * Angle_accel;
return Angle_comp;
}
/*---------------------------------------------------------------------------------------------------------*/
/* 输出角度至上位机 */
/*---------------------------------------------------------------------------------------------------------*/
void VisualScopeAngleOutput()
{
int AngleValue_Accel,AngleValue_Gyro,AngleValue_Comp;
uint16_t crcValue;
AngleValue_Accel = ceil(Angle_accel * 10 -0.5);
AngleValue_Gyro = ceil(Angle_gyro * 10 - 0.5);
AngleValue_Comp = ceil(Angle_comp * 10 - 0.5);
outAngleData[0] = AngleValue_Accel & 0xFF;
outAngleData[1] = AngleValue_Accel >> 8;
outAngleData[2] = AngleValue_Gyro & 0xFF;
outAngleData[3] = AngleValue_Gyro >> 8;
outAngleData[4] = AngleValue_Comp & 0xFF;
outAngleData[5] = AngleValue_Comp >> 8;
//计算CRC
crcValue =CRC_CHECK(outAngleData,8);
outAngleData[8] = crcValue & 0xFF;
outAngleData[9] = crcValue >> 8;
//发送至上位机
HAL_UART_Transmit_DMA(&huart2,outAngleData,sizeof(outAngleData));
}
/* USER CODE END 0 */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* System interrupt init*/
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_I2C1_Init();
MX_TIM2_Init();
MX_USART2_UART_Init();
InitMPU6050();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_DMA(&huart2,rxBuffer,RXSIZE);
HAL_TIM_Base_Start_IT(&htim2);
/* USER CODE END 2 */
/* USER CODE BEGIN 3 */
/* Infinite loop */
while (1)
{
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_5);
VisualScopeAngleOutput();
HAL_Delay(100);
}
/* USER CODE END 3 */
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_ClkInitTypeDef RCC_ClkInitStruct;
RCC_PeriphCLKInitTypeDef PeriphClkInit;
RCC_OscInitTypeDef RCC_OscInitStruct;
__PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = 16;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLLMUL_6;
RCC_OscInitStruct.PLL.PLLDIV = RCC_PLLDIV_3;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1);
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART2;
PeriphClkInit.Usart2ClockSelection = RCC_USART2CLKSOURCE_PCLK1;
HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit);
__SYSCFG_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART2)
{
memcpy(txBuffer,rxBuffer,RXSIZE);
HAL_UART_Receive_DMA(huart,rxBuffer,RXSIZE);
HAL_UART_Transmit_DMA(huart,txBuffer,TXSIZE);
}
}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
int32_t GyroValue;
Calc_AngleAccel();
GyroValue = Calc_AngleGyro();
ComplementFilter(GyroValue);
}
I2C.C
#include "i2c.h"
#include "gpio.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
I2C_HandleTypeDef hi2cx;
/* I2C1 init function */
void MX_I2C1_Init(void)
{
hi2cx.Instance = I2C1;
hi2cx.Init.Timing = 0x20D22930;
hi2cx.Init.OwnAddress1 = 0;
hi2cx.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2cx.Init.DualAddressMode = I2C_DUALADDRESS_DISABLED;
hi2cx.Init.OwnAddress2 = 0;
hi2cx.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2cx.Init.GeneralCallMode = I2C_GENERALCALL_DISABLED;
hi2cx.Init.NoStretchMode = I2C_NOSTRETCH_DISABLED;
HAL_I2C_Init(&hi2cx);
/**Configure Analogue filter
*/
HAL_I2CEx_AnalogFilter_Config(&hi2cx, I2C_ANALOGFILTER_ENABLED);
}
void HAL_I2C_MspInit(I2C_HandleTypeDef* hi2c)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(hi2c->Instance==I2C1)
{
/* Peripheral clock enable */
__I2C1_CLK_ENABLE();
/**I2C1 GPIO Configuration
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
*/
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF1_I2C1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
}
void HAL_I2C_MspDeInit(I2C_HandleTypeDef* hi2c)
{
if(hi2c->Instance==I2C1)
{
/* Peripheral clock disable */
__I2C1_CLK_DISABLE();
/**I2C1 GPIO Configuration
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_6|GPIO_PIN_7);
}
}
-------------------------------------------------------------------------------传说中的分界线----------------------------------------------------------------------------
usart.c
#include "usart.h"
#include "gpio.h"
#include "dma.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
UART_HandleTypeDef huart2;
DMA_HandleTypeDef hdma_usart2_rx;
DMA_HandleTypeDef hdma_usart2_tx;
/* USART2 init function */
void MX_USART2_UART_Init(void)
{
huart2.Instance = USART2;
huart2.Init.BaudRate = 9600;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
huart2.Init.OneBitSampling = UART_ONEBIT_SAMPLING_DISABLED;
huart2.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
HAL_UART_Init(&huart2);
}
void HAL_UART_MspInit(UART_HandleTypeDef* huart)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(huart->Instance==USART2)
{
/* Peripheral clock enable */
__USART2_CLK_ENABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_USART2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_LOW;
GPIO_InitStruct.Alternate = GPIO_AF4_USART2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* Peripheral DMA init*/
hdma_usart2_rx.Instance = DMA1_Channel5;
hdma_usart2_rx.Init.Request = DMA_REQUEST_4;
hdma_usart2_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_usart2_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart2_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart2_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart2_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart2_rx.Init.Mode = DMA_NORMAL;
hdma_usart2_rx.Init.Priority = DMA_PRIORITY_LOW;
HAL_DMA_Init(&hdma_usart2_rx);
__HAL_LINKDMA(huart,hdmarx,hdma_usart2_rx);
hdma_usart2_tx.Instance = DMA1_Channel4;
hdma_usart2_tx.Init.Request = DMA_REQUEST_4;
hdma_usart2_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_usart2_tx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart2_tx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart2_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart2_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart2_tx.Init.Mode = DMA_NORMAL;
hdma_usart2_tx.Init.Priority = DMA_PRIORITY_LOW;
HAL_DMA_Init(&hdma_usart2_tx);
__HAL_LINKDMA(huart,hdmatx,hdma_usart2_tx);
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* huart)
{
if(huart->Instance==USART2)
{
/* Peripheral clock disable */
__USART2_CLK_DISABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_2|GPIO_PIN_3);
/* Peripheral DMA DeInit*/
HAL_DMA_DeInit(huart->hdmarx);
HAL_DMA_DeInit(huart->hdmatx);
}
}
-------------------------------------------------------------------------------传说中的分界线----------------------------------------------------------------------------
mpu6050.c
#include "stm32l0xx_hal.h"
#include "MPU6050.h"
//各坐标轴上静止偏差(重力,角速度)
int16_t offsetAccelX = -195;
int16_t offsetAccelY = 560;
int16_t offsetAccelZ = -169;
int16_t offsetGyroX = 12;
int16_t offsetGyroY = 33;
int16_t offsetGyroZ = 4;
extern I2C_HandleTypeDef hi2cx;
//**************************************
//向I2C设备写入一个字节数据
//**************************************
void Single_WriteI2C(uint8_t REG_Address,uint8_t REG_data)
{
uint8_t rxData[2] = {REG_Address,REG_data};
while(HAL_I2C_Master_Transmit(&hi2cx,SlaveAddress,rxData,2,5000) != HAL_OK)
{
if(HAL_I2C_GetError(&hi2cx) != HAL_I2C_ERROR_AF)
{}
}
}
//**************************************
//从I2C设备读取一个字节数据
//**************************************
uint8_t Single_ReadI2C(uint8_t REG_Address)
{
uint8_t REG_data;
while(HAL_I2C_Master_Transmit(&hi2cx,SlaveAddress,®_Address,1,5000) != HAL_OK)
{
if(HAL_I2C_GetError(&hi2cx) != HAL_I2C_ERROR_AF)
{}
}
if(HAL_I2C_Master_Receive(&hi2cx,SlaveAddress+1,®_data,1,5000) != HAL_OK)
{
if(HAL_I2C_GetError(&hi2cx) != HAL_I2C_ERROR_AF)
{}
}
return REG_data;
}
//**************************************
//初始化MPU6050
//**************************************
void InitMPU6050()
{
Single_WriteI2C(PWR_MGMT_1, 0x00); //解除休眠状态
Single_WriteI2C(SMPLRT_DIV, 0x07);
Single_WriteI2C(CONFIG, 0x06);
Single_WriteI2C(GYRO_CONFIG, 0x18);
Single_WriteI2C(ACCEL_CONFIG, 0x01);
}
//**************************************
//合成数据
//**************************************
int16_t GetMPUOutValue(uint8_t REG_Address)
{
int16_t result;
uint8_t H,L;
H=Single_ReadI2C(REG_Address);
L=Single_ReadI2C(REG_Address+1);
result = (H<<8)+L;
return result; //合成数据
}
//**************************************
//取某一轴上的加速度数据
//**************************************
int16_t GetAccelValue(char axis)
{
int16_t result = 0;
switch(axis)
{
case 'x':
case 'X':
{
result = GetMPUOutValue(ACCEL_XOUT_H) - offsetAccelX;
}
break;
case 'y':
case 'Y':
{
result = GetMPUOutValue(ACCEL_YOUT_H) - offsetAccelY;
}
break;
case 'z':
case 'Z':
{
result = GetMPUOutValue(ACCEL_ZOUT_H) - offsetAccelZ;
}
break;
}
return result;
}
//**************************************
//取某一轴上的角速度数据
//**************************************
int16_t GetGyroValue(char axis)
{
int16_t result = 0;
switch(axis)
{
case 'x':
case 'X':
{
result = GetMPUOutValue(GYRO_XOUT_H) - offsetGyroX;
}
break;
case 'y':
case 'Y':
{
result = GetMPUOutValue(GYRO_YOUT_H) - offsetGyroY;
}
break;
case 'z':
case 'Z':
{
result = GetMPUOutValue(GYRO_ZOUT_H) - offsetGyroZ;
}
break;
}
return result;
}
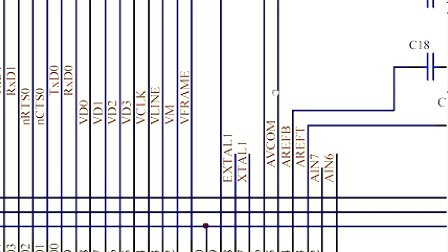
硬件连接

用Visual Scope输出的波型