0 引言
航标是航行标志的简称,是指示航道方向、界限与碍航物的标志,为船舶的安全航行提供了基本保障。航标终端通过测量航标灯工作状态(电压、电流、可用灯泡数、闪光周期、位置信息等参数),再将这些状态信息以数据报的形式在CPU的控制下通过公共通讯网发送回航标监控中心。同时,监控中心也可以对航标进行远程遥控。这样,就能使得当代的航道建设趋于数字化、信息化。
1.系统总体设计
航标终端需要测量和控制的对象参数主要有电压、电流、灯质、日光值等,既有模拟量又有数字量。终端必须是一个电源适应能力强、抗干扰能力强、功耗低、集成模数转换的SOC(System On Chip)系统。本航标终端采用主、从双CPU结构。系统主控制器采用NXP(恩智浦)公司的32位Cortex-M3内核嵌入式微处理器 LPC1769,负责与监控中心的GPRS/GSM通信、GPS信号的读取与前差分处理、本地数据的存储、RS-232/485扩展通信、模拟量检测、与从CPU通信及系统远程升级等工作,并预留其他通信接口;从CPU采用NXP公司的32位Cortex-M0内核嵌入式微处理器LPC1114,负责灯质、倾角/撞击和环境温度等参数的检测并预留其他通信接口。基于ARM的航标终端系统框架如图1示。
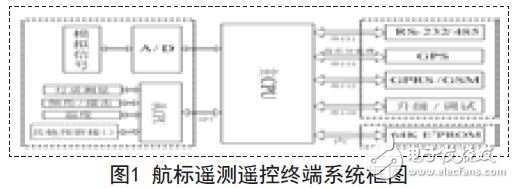
图1中,A/D用于检测电压和电流;从CPU负责灯质、倾角/撞击、温度的测量及预留接口;64K E2PROM保存配置数据、历史数据等;串口0用于在系统升级和调试,串口2用于GPRS/GSM模块通讯,串口3用于GPS数据的通讯,串口1用于提供一个RS-232/485接口,和其他外设通讯。
2.主要模块硬件电路设计
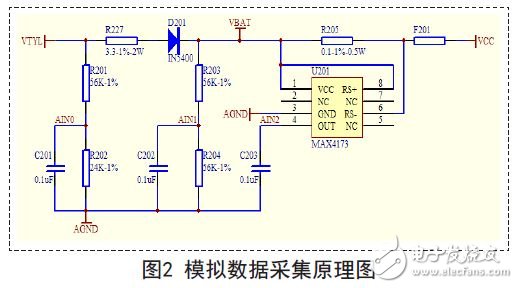
2.1 A/D测量电路
模拟量测量包括航标灯、电池、太阳能板等的电压、电流。电压直接通过滤波电路送入A/D转换器进行处理。电流的测量则通过电流传感器将电流转换成电压量并滤波后送入A/D转换器。电路如图2所示。
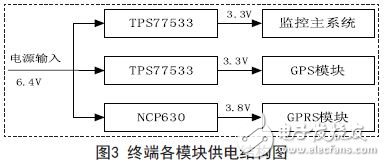
2.2 电源控制
电源设计上采用3片高效率、低压差的线性稳压电源(LDO)分时工作来实现系统电源的高效管理。其中,监控主系统和GPS各采用一片TPS77533供电,把航标灯电池上6.4V的电压降到监控系统所需要的3.3V电压。TPS77533是美国TI公司生产的一款高效率、低压差线性稳压集成电路,具有外围电路简单、电压转换效率高(最高可达92%)、输入电压范围宽、使用稳定可靠等特点,适用于绝大多数工作电压范围的航标灯的使用。由于通信模块在 GPRS发射时的瞬间电流可高达2A/3.8V,因此,为了提高系统的稳定性,防止各模块之间的影响和干扰,本系统采用一片大功率的线性稳压电源 NCP630对GPRS模块单独供电,配合大电容蓄能滤波电路(多个电容并联实现)方式,给GPRS提供充足的能量。NCP630是安森美公司的一款大电流、高效率、低压差线性稳压集成电路,其最大输出电流可达3A,最高电压转换效率90%,配合多个大电容的并联,可以给GPRS模块提供充足的能量,保证在GPRS的发射瞬间不会因电流过大而拉低模块电压,导致GPRS工作不稳定。电源控制电路的结构图如图3所示。
3.航标遥测
航标遥测遥控终端上电后,由终端的数据采集电路开始工作,采集航标灯的各个工作状态,包括电源的动态电压、静态电压、充电电压、动态电流、充电电流、运行灯质等等。
为降低RTU系统的功耗,采集电路是以一定的时间间隔进行工作(可设置),每次每个参数测量至少 10次,然后取平均值作为本时刻的数据,并将这些数据和存储的中心设置参数(阀值)进行比较,判断航标灯是否出现异常情况,如果异常,则由ARM主系统申请进行报警处理。在ARM主系统得到航标运行参数和航标位置参数后,按照规定的数据协议和GSM协议、GPRS协议,进行消息编码,由GSM/GPRS模块实现数据发送。系统采用GPRS实时传输(主)和SMS短消息(辅)两种通信方式,主辅通信方式通过科学组合、自动适应、自动切换,采用抗干扰和过滤设计。传送数据时采用无应答时重发,GPRS不成功转为短消息传送,短消息不成功重启通信模块重新发送,在限时内不成功自动保存,等待网络恢复时补发。
对于处理较为复杂和实时性要求高的闪光灯灯质测量、加速度撞击测量时,先由从 CPU(LPC1114)先进行预处理后再交由主CPU(LPC1769),这样可以保证当高性能的主CPU处于低频省电休眠时也不会降低航标终端监测的实时性和报警的及时性,保证在终端处于休眠时也能在线监测航标灯的状态、工作参数、撞击情况、充电和电池情况,出现异常和超限时马上触发报警处理。当 GPS模块没有关机时可对浮标的位置持续测量及报警判断;当GSM模块没有关机时,监控中心可以随时查询其实时状态。
4.嵌入式软件设计
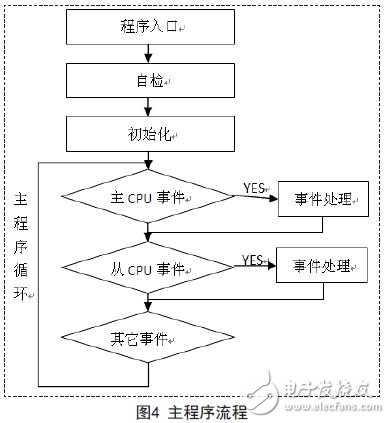
终端嵌入式软件分为核心总控模块、通信模块、定位模块、A/D检测模块、灯质和姿态撞击测量等独立模块以及电源管理模块。总控模块与电源模块协同工作,自带看门狗,能自动检测、自动重启,其它模块出现异常时会自动报警,并且可独立工作,出现故障时不影响别的模块工作。主程序流程如图4所示。
5.结束语
本文提出了一种基于ARM的航标终端设计方案,为了使终端更加灵活高效的工作,本方案采用了双CPU架构设计。在航标遥测遥控系统的控制下,以低功耗的条件实现了航标灯灯质的检测、碰撞检测、差分定位、远程控制等功能,对于建设现代数字航道系统具有重要的作用。