摘要:针对等离子体设备监控系统的实际应用需求,提出了一个基于TMS320DM643的视频图像处理监控系统。系统通过CCD摄像头获取设备现场的图像信息,采用TMS320DM643作为核心处理器,应用DSP/BIOS实时系统,对获取的图像进行了预处理、背景差分、目标提取,最后输出设备的运行状态从而达到监控目的。实验表明,系统能够准确有效地进行目标状态检测,具有很好的实时性。
关键词:TMS320DM643;视频监控;彩色图像处理;DSP/BIOS;YCbCr
0 引言
数字视频监控系统在交通安防等领域有着广泛的应用,而在设备系统的监控中,感兴趣的主要是反映设备状态的各类仪表及音视频信号。随着设备系统日益复杂,传统的人工方法由于效率低下、自动化程度不高,在一些场合己不能满足监控需要,特别是人员无法常驻、无法就地工作以及对监控自动化程度要求高的环境。为解决上述问题,基于嵌入式的远程监控系统应运而生,并与图像分析和处理技术相结合,实现了一定的智能监控功能,较好地满足了设备系统监控的实际需要。
本系统依托于等离子体发生设备,对等离子体发生装置进行了视频监控。等离子体发生装置在真空状态下产生等离子体的过程中,颜色会发生相应的变化,通过对其颜色的实时监控达到实时获取发生装置状态的目的,从而达到监控目的。
1 系统硬件设计
1.1 TMS320DM643性能分析
TMS320DM643是TI公司推出的针对多媒体处理的高性能数字媒体处理器,在图像处理方面具备优势。在C64xDSP的基础上,针对多媒体处理的实际需要,集成了完备的数字视频、数字音频输入输出及以太网接口,该芯片工作主频最高可达600MHz,处理能力可达4800MIPS。为提高处理效率,保证高速的DSP和相对低速的外设之间速率匹配,TMS320DM643在片上设有L1D、L1P和L2RAM/Cache两级缓存,二级缓存L2的具体用途通过缓存寄存器的相应位来设置。TMS320DM643采用了增强型超长指令字结构,内核有8个功能单元(两个乘法器和6个算术逻辑单元、64个32位通用寄存器),可在一个周期内完成4个16位乘加运算或8个8位的乘加运算。针对图像处理的实际,也设计了大量相关指令。同时,TMS320DM643还集成了丰富的外围设备和接口,为构建视频设备监控系统提供了便利条件。
1.2 系统的硬件结构
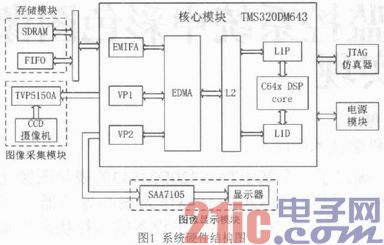
本系统以DSP控制模块为核心,由图像采集模块、存储模块、图像显示模块以及电源管理模块等模块构成,系统的硬件结构如图1所示。
1.3 图像采集模块
图像采集模块由CCD摄像头和TVP5150A视频解码器组成,主要功能是将从CCD摄像头采集来的PAL/NTSC复合视频信号进行采样、量化得到任意分辨率的数字信号,为TMS320DM643提供视频流。
视频解码器选用TVP5150A视频解码芯片,可以将NTSC和PAL制模拟的视频信号转换成BT.656格式的标准数字视频信号(YUV4:2:2)后传输至TMS320DM643。TVP5150A通过标准的IIC总线进行配置,其数据传送率最高可达400 kb/s。同时,由于TMS320DM643支持BT.656格式的标准数字视频信号输入格式,TVP5150A与TMS320DM643实现了无缝连接。TVP5150A与TMS320DM643连接的示意图如图2所示。
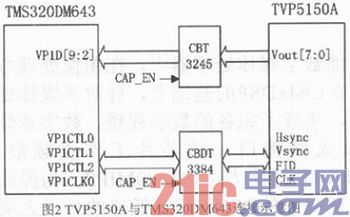
如图2所示,VP1CLK0作为视频源的输入时钟,VP1CLK1未用。而VP1CTL0、VP1CTL1和VP1CTL2则分别作为视频源的CAPEN/AVID/HSYNC、
VBLNK/VSYNC、FID输入同步信号。
1.4 存储模块
本系统的TMS320DM643在视频图像处理时,由于图像数据量很大,会占用相当大的存储空间,但是内部的RAM存储量并不能满足要求。所以本系统通过TMS320DM643的EMIF扩展了SDRAM芯片和FLASH芯片。
SDRAM大小为4M×64位,FLASH大小为4M×8位,通过TMS320DM643的EMIF控制寄存器,可实现对存储器的读写访问。
1.5 图像显示模块
图像显示模块由SAA7105视频编码器与一个显示器组成。它支挣PAL与NTSC格式的视频编码输出;同时该编码器可输出VGA视频,分辨率为1280×1024,这样就可以直接驱动PC显示器进行视频图像的显示,可方便快捷地查看视频图像的实际处理效果。
SAA7105的配置也是通过标准的ⅡC总线来完成的。
1.6 电源模块
本系统采用TPS54310的专用电源芯片,输入为5V,输出为1.4V和3.3V,分别给DSP内核和I/O端口供电,产生另外一个3.3V给视频编解码器及其他芯片供电。注意这两个3.3V要分开设计,以免电源噪声相互干扰。把1.4V模块的电源输出有效引脚PG连接到3.3V模块的允许电压输入引脚EN。这样,只有当1.4V电压有效之后,3.3V电压才开始上电,这就保证了TMS320DM643的内核电压先与I/O电压上电。
2 系统软件设计
2.1 软件开发环境
TI公司为C6000系列处理器提供了完善的集成软件开发环境CCS及相关的支持芯片库和API函数。CCS具有实时性、支持多任务和可视化的特点。
本系统在CCS开发环境上完成视频图像的处理,通过cmd文件定义变量存储区域,同时编写相关GEL初始化文件,使得在CCS与DSP目标板连接后即可初始化相关硬件和进行配置,引用CSL库和API库函数,完成硬件配置,最后基于DSP/BIOS操作系统,通过进程调用完成视频图像处理工作。
TI的DSP/BIOS操作系统,它的典型功能是支持多线程的调度;为方便外设管理,提供了片内支持库;开发了实时分析工具,用来分析算法的性能和效果等。DSP/BIOS有三个部分组成,分别是BIOS配置工具(用于创建和配置目标对象,提供内存分配、线程优先级设置、中断设置等配置功能)、实时分析工具(提供可视化图形界面,用来观察算法或程序的执行情况、变量运行结果及内存地址等)、API应用接口函数(提供丰富的模块操作、线程操作等接口函数供调用)。
RF5是TI公司提供的DSP系统应用程序参考框架,广泛应用于音、视频数字信号等复杂DSP应用系统中。RF5中的数据处理分为四部分:任务(task)、数据通道(channel)、实时内核(cell)及算法(XDAIS)。在本设计中,应用RF5框架来整合各个模块的程序。
2.2 软件程序流程
依据上述的软硬件系统资源,采用基于RF5的软件框架结构设计了本系统的软件程序。在DSP系统外设、工作方式、板上器件的寄存器配置初始化完成后,相应的线程开始采集视频图像,采集完成后,根据要求通过SCOM消息,将图像数组的指针发至下一线程,即视频图像处理线程。然后该线程执行通道内的XDAIS算法,包括图像滤波、图像差分等,完成图像分析处理后,再将数据指针通过SCOM信息发至下一线程,即图像显示线程,完成视频图像的显示等功能。
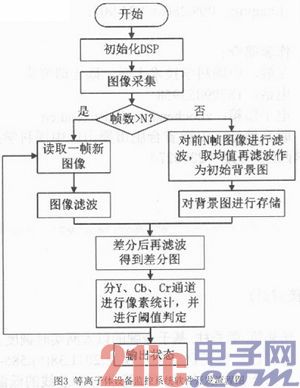
对于等离子体设备监控系统,其软件算法的流程如图3所示。
2.3 彩色图像处理算法
对彩色图像进行处理,首先应选取颜色模型,常用的颜色空间有RGB、HSI、YCbCr等,本系统选用YCbCr空间。与对灰度图像处理的方法不同,彩色图像有两类处理方法:1)单独处理颜色空间的每一个通道,再复合成结果图像;2)把像素的颜色看作颜色空间中的一个点,也可以看作是一个向量,在向量空间中处理图像。另外,彩色图像处理还涉及彩色图像增强、彩色图像滤波、彩色图像压缩和彩色图像分割等处理算法。本文中,对等离子体发生装置的彩色图像进行了图像预处理、背景差分、目标检测等算法实现。
在等离子体发生装置产生等离子体的过程中,随着装置两端电压的升高,装置内气体颜色会发生相应变化,由无色变为紫色,再由紫色变为红色,变化过程如图4所示,图4a是初始状态背景图,图4b是装置内气体变化为紫色时的图,图4c则是装置内气体变化为红色时的图。

对等离子体发生装置的图像采集处理算法具体步骤如下:
(1)采集初始的N帧图像,取均值,再进行中值滤波,作为初始背景图Bg(x,y)。
(2)后续采集的每帧图像Cur(x,y)与初始背景图Bg(x,y)进行分Y、Cb、Cr三通道分别进行差分运算,再滤波得到差分图像Sub(x,y):
Sub_Y(x,y)=Cur_Y(x,y)-Bg_Y(x,y);
Sub_Cb(x,y)=Cur_(2b(x,y)-Bg_Cb(x,y);
Sub_Cr(x,y)=Cur_Cr(x,y)-Bg_Cr(x,y);
(3)差分后发生变化的主要是Cr像素部分,所以求取Sub_Cr(x,y)的最大值Max Sub Cr及其位置x,y。
(4)求出与Max Sub Cr相似的所有像素,满足:(Sub_Cr(x,y)-Max_Sub_Cr)2<T并求出满足上式的所有x,y的最大最小值,x_max,x_min,y_max,y_min。
(5)由于等离子体发生装置近似长方体,所以选取矩形区域(X_min:x_max;y_min:y_max)为有意义区域,后续循环处理只需对该区域进行处理即可,减少了近1/3的数据处理量。
(6)对有意义区域的像素值进行统计,设定一定阈值即可实现判别颜色状态。
3 实验结果与分析
系统帧率为25帧/s,图像分辨率为720×576像素。在实验过程中,观察等离子体发生装置的颜色变化状态,通过将人工判别结果与实际系统的判别输出进行比较,判断系统运行可靠性。实验结果如表1所示。

系统帧率为25帧/s,实时性实验主要测试系统平均单帧判别时间,衡量基准是该值是否低于帧间隔40ms。实验结果如表2所示。

经实验证明,系统识别效果良好,判别准确率达95%以上。同时系统性能方面表现良好,负载均衡,平均单帧识别时间低于29.2ms,小于帧间隔40ms,能够同时满足高实时性和高识别率的要求。
4 结语
基于TMS320DM643的设备监控系统能实时地检测等离子体发生装置的状态变化,在光照变化时识别准确率依然较高。本文根据等离子体发生装置的实际需要,设计开发了基于TS320DM643的硬件平台,实现了实时目标检测。同时,在硬件程序实现过程中对程序进行了优化,应用了IMGLIB图像处理函数库中的中值滤波函数IMG median 3×3,大幅度减少了CPU访问外设SDARM所消耗的时间,同时使用DSP/BIOS实时系统,增强了系统实时性。系统也将不断进行优化,在高实时性与高识别率上实现更好的融合。
![[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用](/Uploads/2014_12/video/vi8fc8d028840bfa6c191d73d8eafcc08b_s.jpg)


























